Description
Board
M5 Stack Core 1 / 2
Device Description
M5 Stack Core 1 / 2 with the LAN Module with W5500
Hardware Configuration
Pinmap M5 Core 2
Pinmap Lan module
Version
v2.0.3
IDE Name
PlatformIO
Operating System
Windows 10
Flash frequency
40 MHz
PSRAM enabled
no
Upload speed
115200
Description
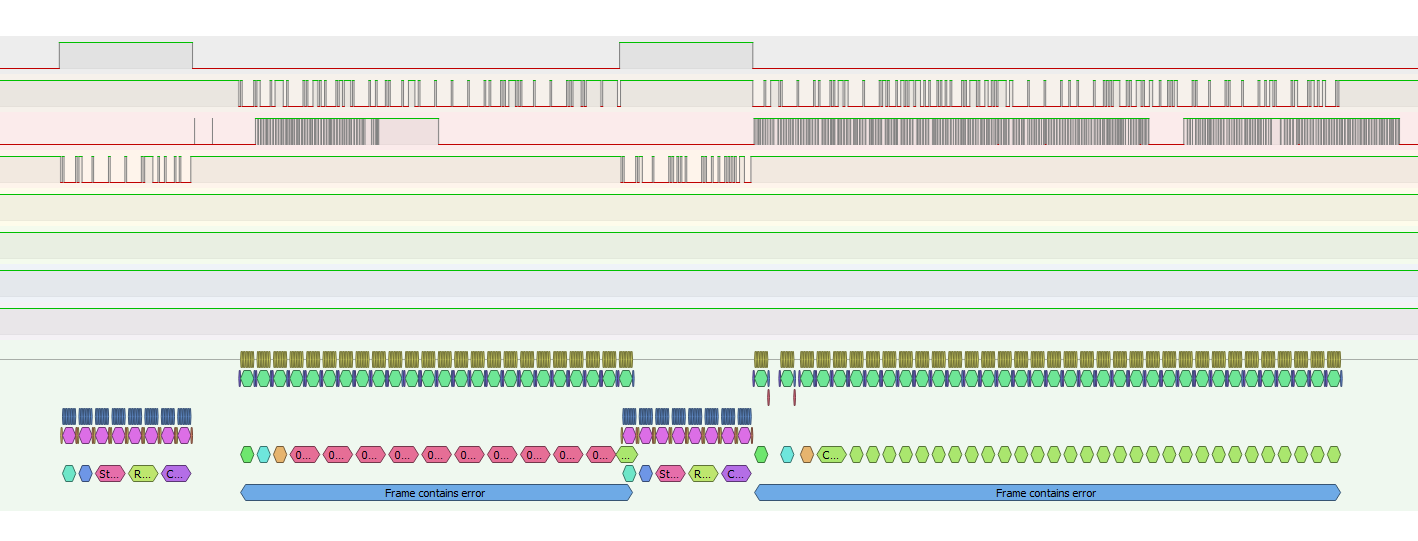
Low baudrate (9600) causes the serial.read() command to fail and not read bytes on the Modbus. Might there be some interfering code that runs in timed cycles with a very high priority that could creates issues for the serial.read().

The failed read seen above happens every 6th read.

Complete message:
The third line is a pin that gets toggled to high before serial.read() and to low after seral.read().
Sketch
// Allocate initial receive buffer size: 1 block of BUFBLOCKSIZE bytes
const uint16_t BUFBLOCKSIZE(512);
uint8_t *buffer = new uint8_t[BUFBLOCKSIZE];
ModbusMessage rv;
// Index into buffer
register uint16_t bufferPtr = 0;
// Byte read
register int b;
// State machine states, RTU mode
enum STATES : uint8_t { WAIT_DATA = 0, IN_PACKET, DATA_READ, FINISHED };
// State machine states, ASCII mode
enum ASTATES : uint8_t { A_WAIT_DATA = 0, A_DATA, A_WAIT_LEAD_OUT, A_FINISHED };
register uint8_t state;
// Timeout tracker
unsigned long TimeOut = millis();
// RTU mode?
if (!ASCIImode) {
// Yes.
state = WAIT_DATA;
// interval tracker
lastMicros = micros();
while (state != FINISHED) {
switch (state) {
// WAIT_DATA: await first data byte, but watch timeout
case WAIT_DATA:
// Blindly try to read a byte
b = serial.read();
// Did we get one?
if (b >= 0) {
// Yes. Note the time.
lastMicros = micros();
// Do we need to skip it, if it is zero?
if (b > 0 || !skipLeadingZeroBytes) {
// No, we can go process it regularly
state = IN_PACKET;
}
} else {
// No, we had no byte. Just check the timeout period
if (millis() - TimeOut >= timeout) {
rv.push_back(TIMEOUT);
state = FINISHED;
}
delay(1);
}
break;
// IN_PACKET: read data until a gap of at least _interval time passed without another byte arriving
case IN_PACKET:
// Are we past the interval gap without another byte?
if (micros() - lastMicros >= interval) {
// Yes, terminate reading
LOG_V("%ldus without data\n", micros() - lastMicros);
state = DATA_READ;
} else {
// No, still in reading sequence
// Did we get a byte?
if (b >= 0) {
// Yes, collect it
buffer[bufferPtr++] = b;
// Mark time of last byte
lastMicros = micros();
// Buffer full?
if (bufferPtr >= BUFBLOCKSIZE) {
// Yes. Something fishy here - bail out!
rv.push_back(PACKET_LENGTH_ERROR);
state = FINISHED;
break;
}
}
// Buffer has space left - try to read another byte
b = serial.read();
}
break;
// DATA_READ: successfully gathered some data. Prepare return object.
case DATA_READ:
// Did we get a sensible buffer length?
HEXDUMP_D("Raw buffer received", buffer, bufferPtr);
tmp_copy.assign(buffer, buffer + bufferPtr);
if (bufferPtr >= 4)
{
// Yes. Check CRC
if (!validCRC(buffer, bufferPtr)) {
// Ooops. CRC is wrong.
rv.push_back(CRC_ERROR);
tmp_failed = true;
} else {
// CRC was fine, Now allocate response object without the CRC
for (uint16_t i = 0; i < bufferPtr - 2; ++i) {
rv.push_back(buffer[i]);
}
}
} else {
// No, packet was too short for anything usable. Return error
rv.push_back(PACKET_LENGTH_ERROR);
tmp_failed = true;
}
state = FINISHED;
break;
// FINISHED: we are done, clean up.
case FINISHED:
// CLear serial buffer in case something is left trailing
// May happen with servers too slow!
while (serial.available()) serial.read();
break;
}
}
}
// Deallocate buffer
delete[] buffer;
return rv;Debug Message
[244292][E-MB][DUMP] (.pio/libdeps/m5stack-core-esp32/eModbus/src/RTUutils.cpp:497) - Size: [23], Content: [02 5E EA 06 00 00 08 00 50 0F 71 0C A8 00 01 00 01 00 64 00 03 2B A9 ]
[244300][MB][E] (lib/modbus/ModbusMaster.cpp:304) - Error: (E2) - (CRC check error).
[269243][E-MB][DUMP] (.pio/libdeps/m5stack-core-esp32/eModbus/src/RTUutils.cpp:497) - Size: [18], Content: [01 03 3E 00 71 02 7B 00 04 01 3C 00 00 00 00 02 79 01 ]
[269248][MB][E] (lib/modbus/ModbusMaster.cpp:304) - Error: (E2) - (CRC check error).
[269292][E-MB][DUMP] (.pio/libdeps/m5stack-core-esp32/eModbus/src/RTUutils.cpp:497) - Size: [23], Content: [F9 4C 9F 00 00 00 08 00 50 0F 71 0C A8 00 01 00 01 00 64 00 03 33 EA ]
[269298][MB][E] (lib/modbus/ModbusMaster.cpp:304) - Error: (E2) - (CRC check error).
[294243][E-MB][DUMP] (.pio/libdeps/m5stack-core-esp32/eModbus/src/RTUutils.cpp:497) - Size: [18], Content: [01 03 3E 00 71 02 7C 00 04 01 3C 00 00 00 00 02 79 01 ]
[294248][MB][E] (lib/modbus/ModbusMaster.cpp:304) - Error: (E2) - (CRC check error).
[294293][E-MB][DUMP] (.pio/libdeps/m5stack-core-esp32/eModbus/src/RTUutils.cpp:497) - Size: [22], Content: [01 EA 06 00 00 08 00 50 0F 71 0C A8 00 01 00 01 00 64 00 03 49 01 ]
[294299][MB][E] (lib/modbus/ModbusMaster.cpp:304) - Error: (E2) - (CRC check error).
[319242][E-MB][DUMP] (.pio/libdeps/m5stack-core-esp32/eModbus/src/RTUutils.cpp:497) - Size: [18], Content: [01 03 3E 00 71 02 7C 00 04 01 3C 00 00 00 00 02 79 00 ]
[319247][MB][E] (lib/modbus/ModbusMaster.cpp:304) - Error: (E2) - (CRC check error).
[319292][E-MB][DUMP] (.pio/libdeps/m5stack-core-esp32/eModbus/src/RTUutils.cpp:497) - Size: [23], Content: [FF 4C 9F 00 00 00 08 00 50 0F 71 0C A8 00 01 00 01 00 64 00 03 8C 91 ]
[319297][MB][E] (lib/modbus/ModbusMaster.cpp:304) - Error: (E2) - (CRC check error).
[339351][E-MB][DUMP] (.pio/libdeps/m5stack-core-esp32/eModbus/src/RTUutils.cpp:497) - Size: [3], Content: [D3 12 FF ]
[339353][MB][E] (lib/modbus/ModbusMaster.cpp:304) - Error: (E5) - (Packet length error).
[344233][E-MB][DUMP] (.pio/libdeps/m5stack-core-esp32/eModbus/src/RTUutils.cpp:497) - Size: [7], Content: [01 03 3E 00 71 02 7C ]
[344235][MB][E] (lib/modbus/ModbusMaster.cpp:304) - Error: (E2) - (CRC check error).
[344294][E-MB][DUMP] (.pio/libdeps/m5stack-core-esp32/eModbus/src/RTUutils.cpp:497) - Size: [35], Content: [7A 00 00 02 B9 00 00 0B D6 27 28 02 79 4C 9F 00 00 00 08 00 50 0F 71 0C A8 00 01 00 01
00 64 00 03 A2 09 ]
[344303][MB][E] (lib/modbus/ModbusMaster.cpp:304) - Error: (E2) - (CRC check error).
[364269][E-MB][DUMP] (.pio/libdeps/m5stack-core-esp32/eModbus/src/RTUutils.cpp:497) - Size: [42], Content: [01 03 3E 00 71 02 7B 00 04 01 3D 00 00 00 00 02 79 01 01 00 78 FF FF 00 00 02 72 00 01
00 01 01 84 00 00 02 B9 00 00 0B D6 27 ]
[364281][MB][E] (lib/modbus/ModbusMaster.cpp:304) - Error: (E2) - (CRC check error).
[389244][E-MB][DUMP] (.pio/libdeps/m5stack-core-esp32/eModbus/src/RTUutils.cpp:497) - Size: [19], Content: [01 03 3E 00 71 02 7C 00 04 01 3C 00 00 00 00 02 79 01 00 ]
[389249][MB][E] (lib/modbus/ModbusMaster.cpp:304) - Error: (E2) - (CRC check error).
[389295][E-MB][DUMP] (.pio/libdeps/m5stack-core-esp32/eModbus/src/RTUutils.cpp:497) - Size: [20], Content: [06 00 00 08 00 50 0F 71 0C A8 00 01 00 01 00 64 00 03 D2 F8 ]
[389300][MB][E] (lib/modbus/ModbusMaster.cpp:304) - Error: (E2) - (CRC check error).
Other Steps to Reproduce
See issue on the eModbus library about the same problem. Conclusion was that it might be a problem with the Base library. (eModbus/eModbus#198)
The same issue happens on both Core 1 and Core 2 as well as with a custom adapter for modbus or the WAN 5500 module.
I have checked existing issues, online documentation and the Troubleshooting Guide
- I confirm I have checked existing issues, online documentation and Troubleshooting guide.
Metadata
Metadata
Assignees
Type
Projects
Status