diff --git a/.github/workflows/compile-examples.yml b/.github/workflows/compile-examples.yml
index f573626..7912e76 100644
--- a/.github/workflows/compile-examples.yml
+++ b/.github/workflows/compile-examples.yml
@@ -1,3 +1,4 @@
+# Source: https://github.com/per1234/.github/blob/main/workflow-templates/compile-examples-private.md
name: Compile Examples
# See: https://docs.github.com/en/actions/reference/events-that-trigger-workflows
@@ -22,11 +23,9 @@ on:
env:
UNIVERSAL_SKETCH_PATHS: |
- - examples/Battery
- - examples/Charger
- - examples/DeepSleep_WakeFromPin
- - examples/DeepSleep_WakeFromRTC
- - examples/Powershell
+ - examples/Battery
+ - examples/Charger
+ - examples/Standby_WakeFromPin
SKETCHES_REPORTS_PATH: sketches-reports
SKETCHES_REPORTS_ARTIFACT_NAME: sketches-reports
@@ -43,10 +42,18 @@ jobs:
matrix:
board:
+ - fqbn: arduino:mbed_portenta:envie_m7
+ platforms: |
+ - name: arduino:mbed_portenta
+ artifact-name-suffix: arduino-mbed_portenta-envie_m7
+ additional-sketch-paths: |
+ - examples/Standby_WakeFromRTC_H7
- fqbn: arduino:renesas_portenta:portenta_c33
platforms: |
- name: arduino:renesas_portenta
-
+ artifact-name-suffix: arduino-renesas_portenta-portenta_c33
+ additional-sketch-paths: |
+ - examples/Standby_WakeFromRTC_C33
steps:
- name: Checkout repository
@@ -59,11 +66,10 @@ jobs:
fqbn: ${{ matrix.board.fqbn }}
platforms: ${{ matrix.board.platforms }}
libraries: |
- # Install the library from the local path.
- source-path: ./
- # - name: Arduino_PF1550
- - source-url: https://github.com/cristidragomir97/Arduino_PF1550_old.git
- - source-url: https://github.com/cristidragomir97/Arduino_Portenta_C33_LowPower.git
+ - name: Arduino_PF1550
+ - name: Arduino_LowPowerPortentaH7
+ - source-url: https://github.com/arduino-libraries/Arduino_LowPowerPortentaC33.git
sketch-paths: |
${{ env.UNIVERSAL_SKETCH_PATHS }}
${{ matrix.board.additional-sketch-paths }}
@@ -74,29 +80,5 @@ jobs:
uses: actions/upload-artifact@v4
with:
if-no-files-found: error
+ name: sketches-report-${{ matrix.board.artifact-name-suffix }}
path: ${{ env.SKETCHES_REPORTS_PATH }}
- name: ${{ env.SKETCHES_REPORTS_ARTIFACT_NAME }}
-
- report-size-deltas:
- needs: build
- # Run even if some compilations failed.
- if: always() && github.event_name == 'pull_request'
- runs-on: ubuntu-latest
- permissions:
- pull-requests: write
-
- steps:
- - name: Download sketches reports artifact
- id: download-artifact
- continue-on-error: true # If compilation failed for all boards then there are no artifacts
- uses: actions/download-artifact@v4
- with:
- name: ${{ env.SKETCHES_REPORTS_ARTIFACT_NAME }}
- path: ${{ env.SKETCHES_REPORTS_PATH }}
-
- - name: Comment size deltas report to PR
- uses: arduino/report-size-deltas@v1
- # If actions/download-artifact failed, there are no artifacts to report from.
- if: steps.download-artifact.outcome == 'success'
- with:
- sketches-reports-source: ${{ env.SKETCHES_REPORTS_PATH }}
\ No newline at end of file
diff --git a/README.md b/README.md
index ae36c47..53d2dfd 100644
--- a/README.md
+++ b/README.md
@@ -1,6 +1,6 @@
# ⚡ Arduino PowerManagement
-[](https://github.com/cristidragomir97/Arduino_PowerManagement/actions/workflows/check-arduino.yml) [](https://github.com/cristidragomir97/Arduino_PowerManagement/actions/workflows/compile-examples.yml) [](https://github.com/cristidragomir97/Arduino_PowerManagement/actions/workflows/spell-check.yml) [](https://github.com/cristidragomir97/Arduino_PowerManagement/actions/workflows/sync-labels.yml)
+[](https://github.com/arduino-libraries/Arduino_PowerManagement/actions/workflows/check-arduino.yml) [](https://github.com/arduino-libraries/Arduino_PowerManagement/actions/workflows/compile-examples.yml) [](https://github.com/arduino-libraries/Arduino_PowerManagement/actions/workflows/spell-check.yml) [](https://github.com/arduino-libraries/Arduino_PowerManagement/actions/workflows/sync-labels.yml)
The Arduino Pro Power Management Library serves as a comprehensive and sophisticated power management toolkit tailored for Arduino Pro boards, encompassing the Portenta H7, Portenta C33, and Nicla Vision.
@@ -9,7 +9,7 @@ This library streamlines the interaction with complex hardware components such a
## ✅ Supported Boards
- Arduino Portenta H7
-- Arduino Nicla Vision
+- Arduino Nicla Vision (Low power features not supported yet)
- Arduino Portenta C33
## Core Components of the Library
diff --git a/docs/README.md b/docs/README.md
index 06a23aa..06f5ff7 100644
--- a/docs/README.md
+++ b/docs/README.md
@@ -221,19 +221,19 @@ To simplify things, we have added a convenience function in `Board` called `slee
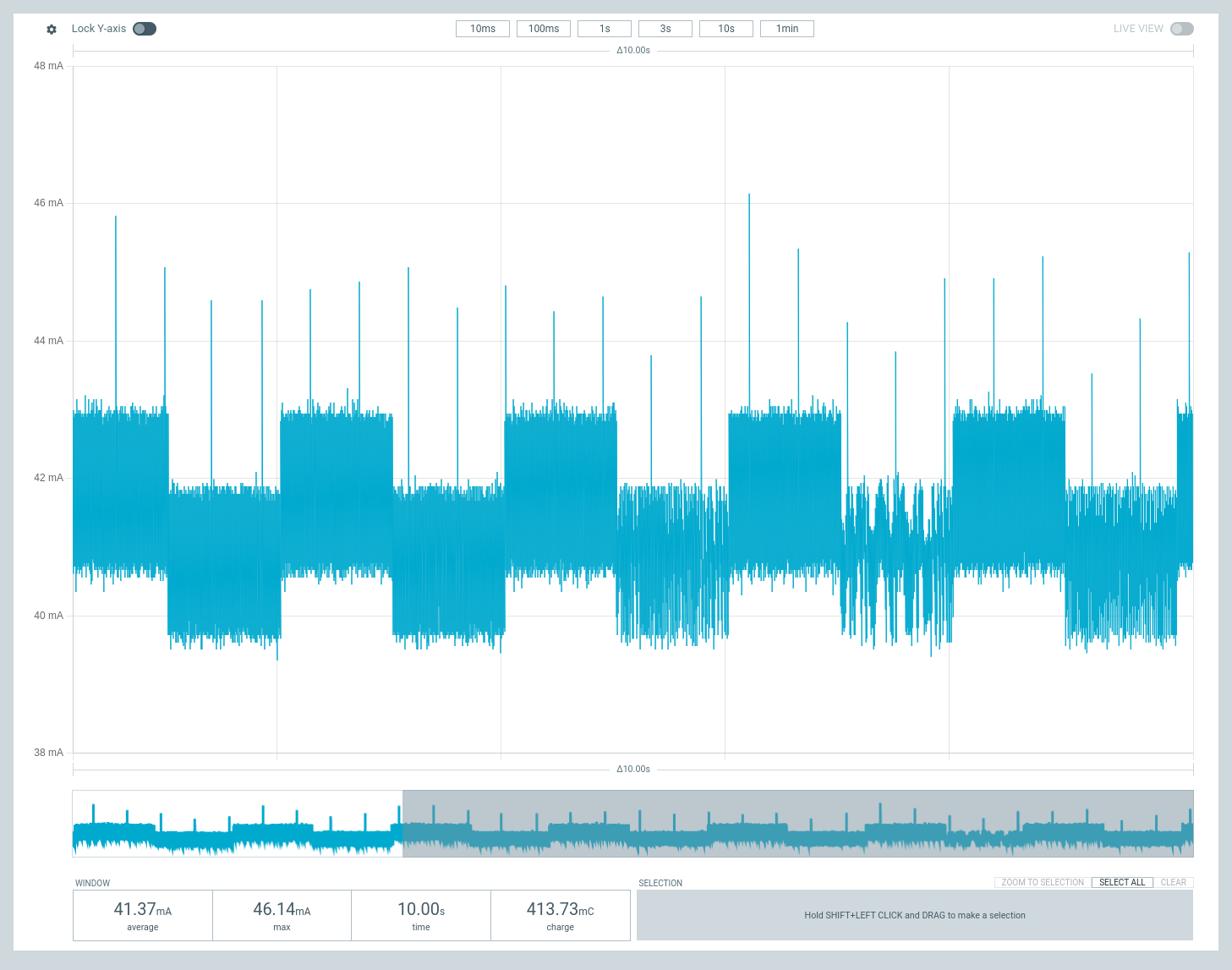
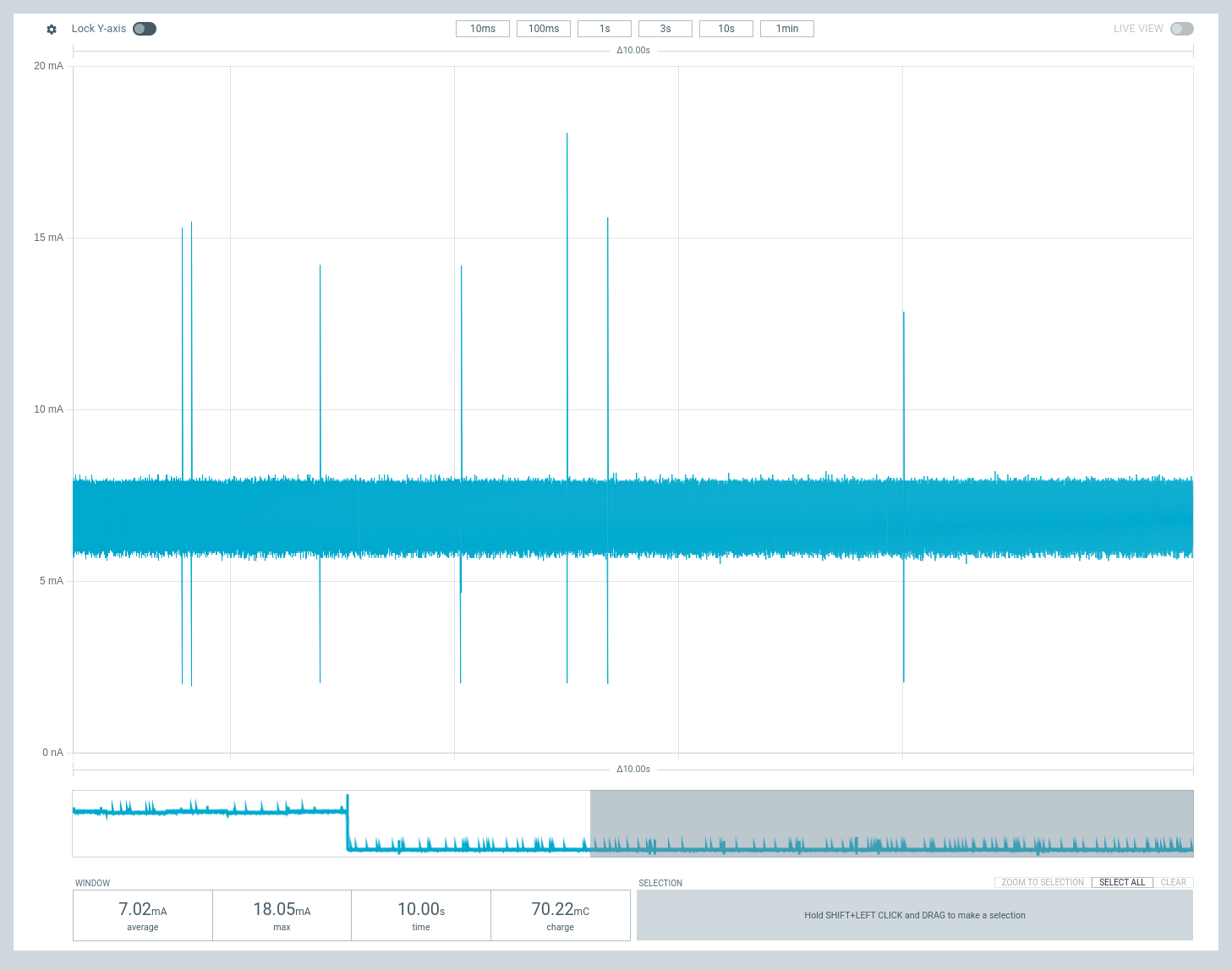
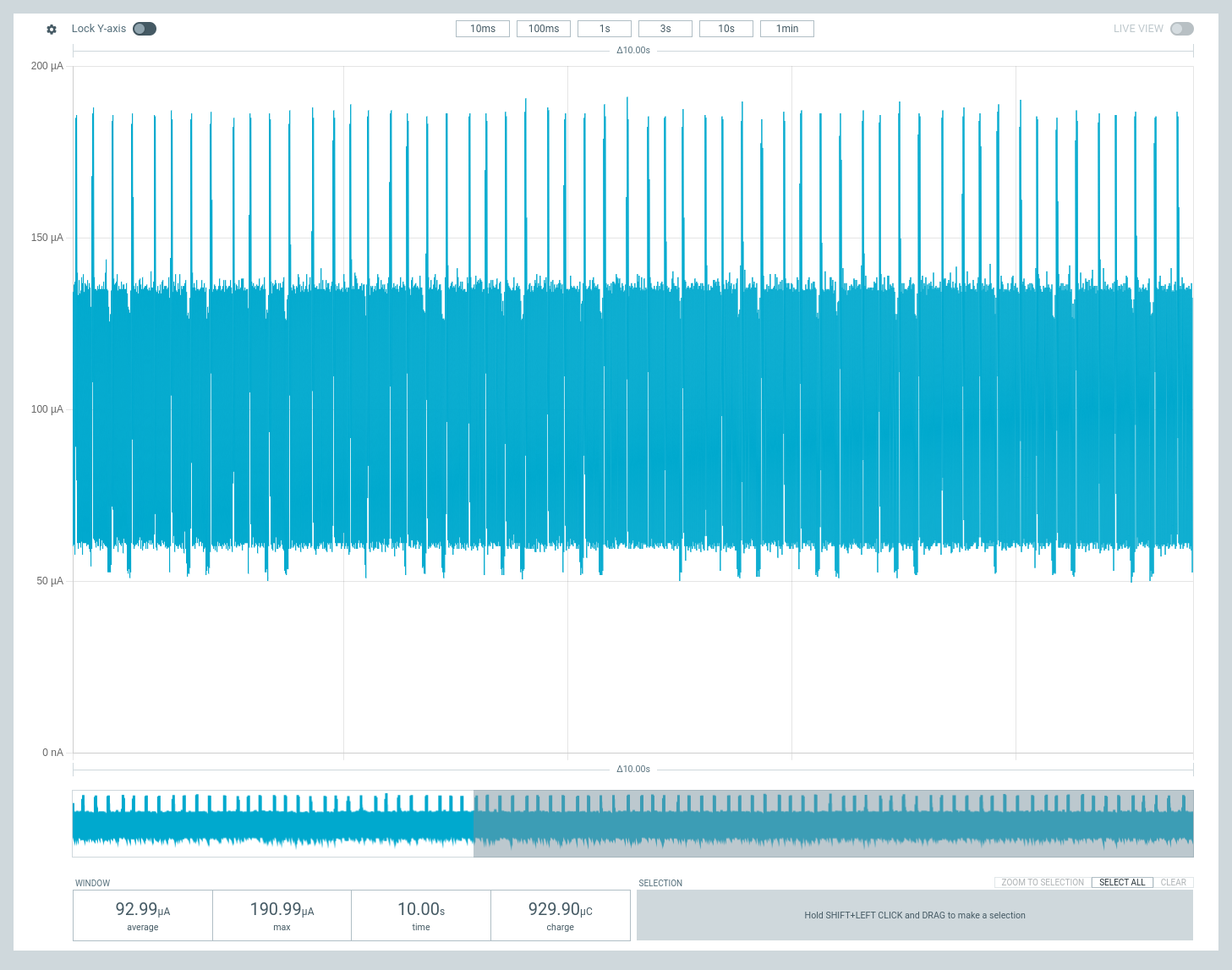
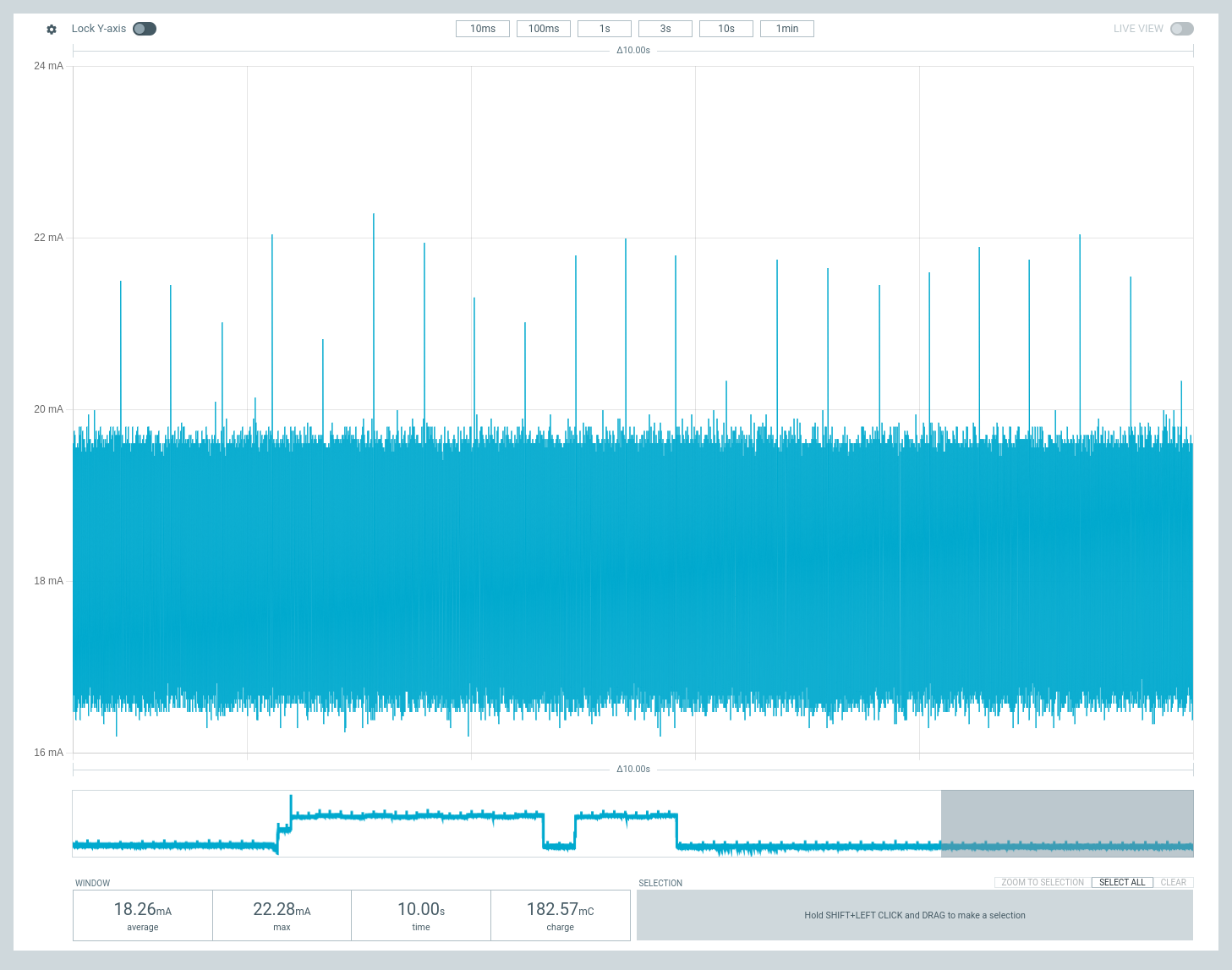
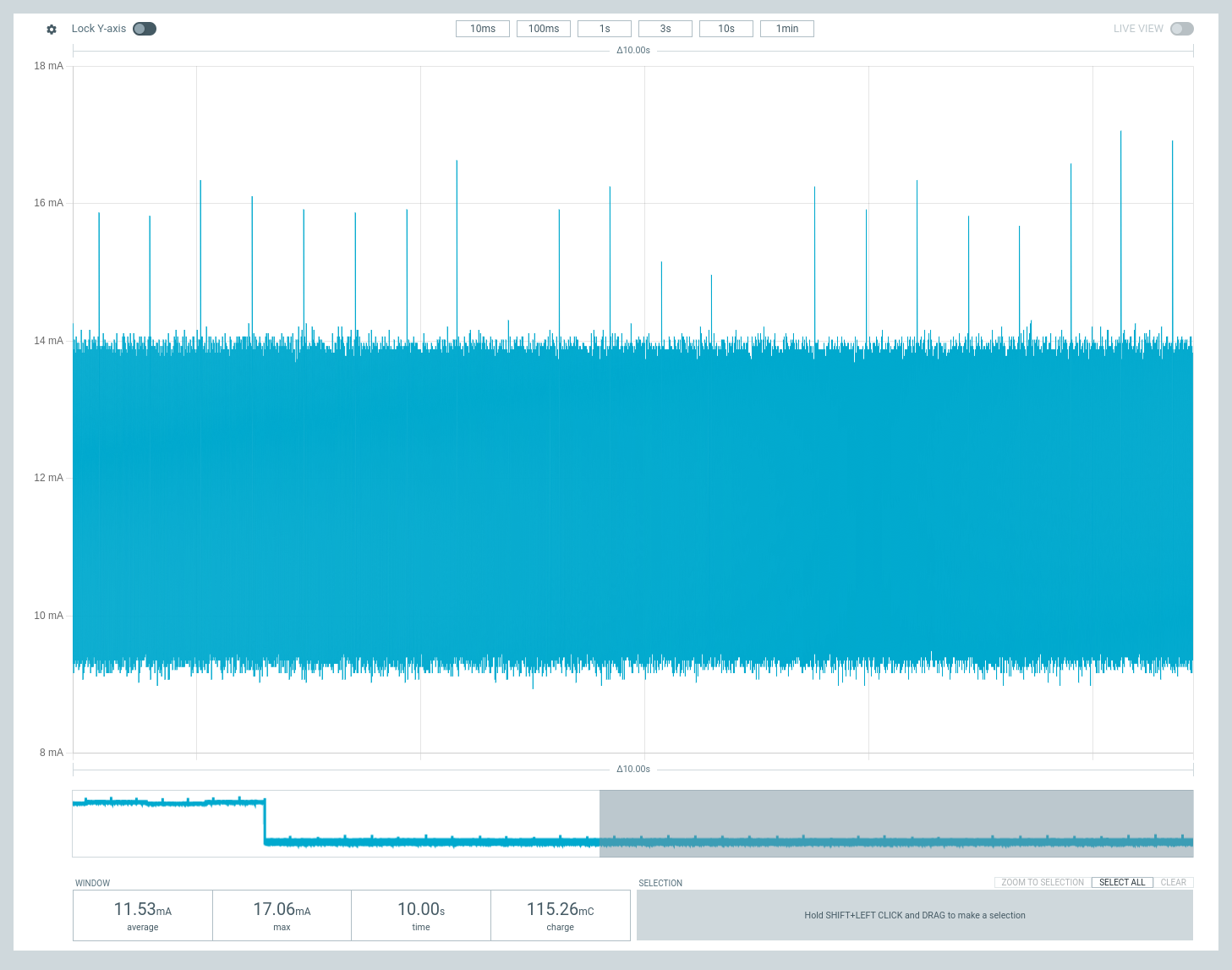
Here's an overview of the reduction in power usage that you can expect from this library on the Portenta C33. The screenshots below are taken from the nRF Power Profiler application using a Nordic PPK2 while running the blink sketch on the same board.
#### Without power optimisations
-
+
#### Sleep (ADC, RGB LED, Secure Element, Wifi and Bluetooth off)
-
+
#### Deep Sleep (ADC, RGB LED, Secure Element, Wifi and Bluetooth off)
-
+
#### Sleep (ADC, RGB LED, Secure Element, Wifi and Bluetooth on)
-
+
#### Deep Sleep (ADC, RGB LED, Secure Element, Wifi and Bluetooth on)
-
+
diff --git a/docs/api.md b/docs/api.md
index e9672e4..a7bb185 100644
--- a/docs/api.md
+++ b/docs/api.md
@@ -2,31 +2,44 @@
Members | Descriptions
--------------------------------|---------------------------------------------
-`class ` [`Battery`](#class_battery) | [Battery](#class_battery) class definition and member function declarations.
-`class ` [`Board`](#class_board) |
-`class ` [`Charger`](#class_charger) | [Charger](#class_charger) class for controlling charging parameters and monitoring charging status.
-`class ` [`PowerManagement`](#class_power_management) |
+`class ` [`Battery`](#class_battery) | This class provides a detailed insight into the battery's health and usage.
+`class ` [`Board`](#class_board) | Represents a board with power management capabilities.
+`class ` [`Charger`](#class_charger) | Class for controlling charging parameters and monitoring charging status.
+`class ` [`MAX1726Driver`](#class_m_a_x1726_driver) | Driver class for the MAX1726 Fuel Gauge IC.
+`struct ` [`BatteryCharacteristics`](#struct_battery_characteristics) | This struct contains the characteristics of the battery.
# class `Battery`
-[Battery](#class_battery) class definition and member function declarations.
+This class provides a detailed insight into the battery's health and usage.
## Summary
Members | Descriptions
--------------------------------|---------------------------------------------
-| [`Battery`](#class_battery_1a36a6234c583e3b3506f4a77e3eb49989) | Constructor for the [Battery](#class_battery) class. Initializes the battery with default values for capacity and empty voltage. The default values are 200mAh and 3000mV respectively. |
-| [`Battery`](#class_battery_1a8c861b38bb868a17f980615c47180655) | Constructor for the [Battery](#class_battery) class. |
-| [`begin`](#class_battery_1abe2e94712b9e846f38f63884f6f995ef) | Initializes the battery communication and configuration. |
-| [`isConnected`](#class_battery_1a9473c4a4583abea991268d0818f19dbe) | Checks if a battery is connected to the system. |
-| [`voltage`](#class_battery_1af6c186181316398ab86a73591adc7229) | Reads the current voltage of the battery. Voltage is usually between 3000mV and 4200mV. |
-| [`averageVoltage`](#class_battery_1a8b343c8244e16caba082643c3d3e9e46) | Reads the average voltage of the battery. |
-| [`current`](#class_battery_1acc60fb79f995897dbcad56535b4ddc7f) | Reads the current flowing from the battery at the moment. |
-| [`averageCurrent`](#class_battery_1a60543d61d65d23745ffb0b11a7b52bb4) | Reads the average current of the battery. |
-| [`temperature`](#class_battery_1a9769b18902c4576c3ed7405c7e58bbea) | Reads the current temperature of the battery. |
-| [`averageTemperature`](#class_battery_1a89b2bbbda3ce367b2e855ce9b258abf0) | Reads the average temperature of the battery. |
-| [`percentage`](#class_battery_1a4d34768c6d8740fad39ce25028a01ee6) | Reads the battery's state of charge (SOC). This value is based on both the voltage and the current of the battery as well as compensation for the battery's age and temperature and discharge rate. |
-| [`remainingCapacity`](#class_battery_1a622eb39d57504e13beaac16003c04fd3) | Reads the remaining capacity of the battery. |
+| [`Battery`](#class_battery_1a36a6234c583e3b3506f4a77e3eb49989) | Initializes the battery object with default values for capacity (0mAh) and empty voltage (3.3V). |
+| [`Battery`](#class_battery_1a64cc106078933ec547418bb649936d0e) | Initializes the battery object with the given battery characteristics. |
+| [`begin`](#class_battery_1ad1ef0c48a213f0ad607f08fca6b30d96) | Initializes the battery communication and configuration. |
+| [`isConnected`](#class_battery_1af280ded5baecec455934785c317df299) | Checks if a battery is connected to the system. |
+| [`voltage`](#class_battery_1add29e37e363157d436d60d2679e4893c) | Reads the current voltage of the battery. Voltage is usually between 3.0V and 4.2V. |
+| [`averageVoltage`](#class_battery_1a90aedc34714a42b3ba38e34db6736cf4) | Reads an average of voltage readings of the battery. |
+| [`minimumVoltage`](#class_battery_1abde4f669d71076bfc09e4004e3369664) | Returns the minimum voltage value measured since the last device reset. At power-up the minimum voltage value is set to FFh (the maximum). |
+| [`maximumVoltage`](#class_battery_1a7baebfaf75aff02842a5eab7ce1629e7) | Returns the maximum voltage value measured since the last device reset. At power-up the maximum voltage value is set to 00h (the minimum). |
+| [`resetMaximumMinimumVoltage`](#class_battery_1a2d4bde0fc0207f0a103f67be970cc412) | Resets the minimum and maximum voltage values. |
+| [`current`](#class_battery_1addc7658b5425f6bfabb8e55c7f73fd33) | Reads the current flowing from the battery at the moment. Negative values indicate that the battery is charging, positive values indicate that the battery is discharging. When no battery is connected, the value is -1. |
+| [`averageCurrent`](#class_battery_1ab74143421658d9aafb05535558a315dc) | Reads an average of current readings of the battery. |
+| [`minimumCurrent`](#class_battery_1a04fb9f935964dc4cad7673d581a4e701) | Reads the minimum current values measured since the last device reset. Note: The resolution of the minimum current value is 160mA so the value is rounded to the nearest 160mA. |
+| [`maximumCurrent`](#class_battery_1a06bbac275505bd55f54904dde086ea72) | Reads the maximum current values measured since the last device reset. Note: The resolution of the minimum current value is 160mA so the value is rounded to the nearest 160mA. |
+| [`resetMaximumMinimumCurrent`](#class_battery_1a86b64cfdb23050cc77a66c1e03750b42) | Resets the minimum and maximum current values. |
+| [`power`](#class_battery_1acc75ec11734cdc2f877e11a122ebf164) | Reads the current power of the battery in milliwatts (mW). This value is calculated based on the current and voltage of the battery. |
+| [`averagePower`](#class_battery_1a41ff59184770622e77ba133818996793) | Reads an average of power readings of the battery in milliwatts (mW). This value is calculated based on the current and voltage of the battery. |
+| [`internalTemperature`](#class_battery_1a3967e87e3ff5bdfbfb99681902d31464) | Reads the current temperature of the internal die of the battery gauge chip. |
+| [`averageInternalTemperature`](#class_battery_1a658633cd49a8b594f6a8e75a126e6b5d) | Reads an average of internal temperature readings of the battery. Note: If the battery temperature was read before, this function will change the configuration to read the internal temperature. You will have to await a couple of temperature readings before getting a meaningful average temperature. |
+| [`percentage`](#class_battery_1a2f7cd7878c7e3b8227ff38e18c8f65e2) | Reads the battery's state of charge (SOC). This value is based on both the voltage and the current of the battery as well as compensation for the battery's age and temperature and discharge rate. |
+| [`remainingCapacity`](#class_battery_1a769e8dddd81779757b8399660b084734) | Reads the remaining capacity of the battery. In combination with [current()](#class_battery_1addc7658b5425f6bfabb8e55c7f73fd33), this value can be used to estimate the remaining time until the battery is empty. |
+| [`fullCapacity`](#class_battery_1afb54a909c0fa3e5d7aed34026a441c49) | Returns the full capacity of the battery. For this to work, the capacity of the battery must be set when initializing the battery object. |
+| [`isEmpty`](#class_battery_1a91fab7f1d3534f6f657e5868ee9af95a) | Checks if the battery is empty. Returns false once the cell voltage rises above the recovery threshold. |
+| [`timeToEmpty`](#class_battery_1af7775216c6a4278af417f8ebdfd94dbe) | Calculates the estimated time until the battery is empty. |
+| [`timeToFull`](#class_battery_1a6eaae4e71787908063ad64ee58ba09d2) | Calculates the estimated time until the battery is fully charged. The value is determined by learning from the experience of prior charge cycles. |
## Members
@@ -36,40 +49,38 @@
Battery()
```
-Constructor for the [Battery](#class_battery) class. Initializes the battery with default values for capacity and empty voltage. The default values are 200mAh and 3000mV respectively.
+Initializes the battery object with default values for capacity (0mAh) and empty voltage (3.3V).
-**See also**: [Battery(int, int)](#class_battery_1a8c861b38bb868a17f980615c47180655)
-
-**See also**: #defaultBatteryCapacityInMiliampereHours
-
-**See also**: #defaultEmptyVoltage
-### `Battery`
+### `Battery`
```cpp
-Battery(int capacityInMilliAmpereHours, int emptyVoltageInMilliVolts)
+Battery( BatteryCharacteristics batteryCharacteristics)
```
-Constructor for the [Battery](#class_battery) class.
+Initializes the battery object with the given battery characteristics.
#### Parameters
-* `capacityInMilliAmpereHours` The capacity of the battery in milliampere-hours (mAh).
-
-* `emptyVoltageInMilliVolts` The voltage at which the battery is considered empty in millivolts (mV).
+* `batteryCharacteristics` The characteristics of the battery.
-### `begin`
+### `begin`
```cpp
-bool begin()
+bool begin(bool enforceReload)
```
Initializes the battery communication and configuration.
+#### Parameters
+* `enforceReload` If set to true, the battery gauge config will be reloaded.
+
+#### Returns
+True if the initialization was successful, false otherwise.
-### `isConnected`
+### `isConnected`
```cpp
boolean isConnected()
@@ -78,128 +89,279 @@ boolean isConnected()
Checks if a battery is connected to the system.
#### Returns
-True if a battery has been connected, false otherwise
+True if a battery is connected, false otherwise
-### `voltage`
+### `voltage`
```cpp
-int voltage()
+float voltage()
```
-Reads the current voltage of the battery. Voltage is usually between 3000mV and 4200mV.
+Reads the current voltage of the battery. Voltage is usually between 3.0V and 4.2V.
#### Returns
-The current voltage in millivolts (mV).
+The current voltage in volts (V).
-### `averageVoltage`
+### `averageVoltage`
```cpp
-unsigned int averageVoltage()
+float averageVoltage()
```
-Reads the average voltage of the battery.
+Reads an average of voltage readings of the battery.
#### Returns
-The average voltage in millivolts (mV).
+The average voltage in volts (V).
-### `current`
+### `minimumVoltage`
```cpp
-int current()
+float minimumVoltage()
```
-Reads the current flowing from the battery at the moment.
+Returns the minimum voltage value measured since the last device reset. At power-up the minimum voltage value is set to FFh (the maximum).
#### Returns
-The current flowing from the battery at the moment miliamperes (mA).
+The minimum voltage value in volts (V).
-### `averageCurrent`
+### `maximumVoltage`
```cpp
-int averageCurrent()
+float maximumVoltage()
```
-Reads the average current of the battery.
+Returns the maximum voltage value measured since the last device reset. At power-up the maximum voltage value is set to 00h (the minimum).
#### Returns
-The average current in millivolts (mV).
+The maximum voltage value in volts (V).
-### `temperature`
+### `resetMaximumMinimumVoltage`
```cpp
-int temperature()
+bool resetMaximumMinimumVoltage()
```
-Reads the current temperature of the battery.
+Resets the minimum and maximum voltage values.
#### Returns
-The current temperature in degrees Celsius.
+True if the minimum and maximum voltage values were successfully reset, false otherwise.
+
+
+### `current`
+
+```cpp
+int16_t current()
+```
+
+Reads the current flowing from the battery at the moment. Negative values indicate that the battery is charging, positive values indicate that the battery is discharging. When no battery is connected, the value is -1.
+
+#### Returns
+The current flowing from the battery in milli amperes (mA).
+
+
+### `averageCurrent`
+
+```cpp
+int16_t averageCurrent()
+```
+
+Reads an average of current readings of the battery.
+
+#### Returns
+The average current in milli amperes (mA).
+
+
+### `minimumCurrent`
+
+```cpp
+int16_t minimumCurrent()
+```
+
+Reads the minimum current values measured since the last device reset. Note: The resolution of the minimum current value is 160mA so the value is rounded to the nearest 160mA.
+
+#### Returns
+The minimum current values in milli amperes (mA).
+
+
+### `maximumCurrent`
+
+```cpp
+int16_t maximumCurrent()
+```
+
+Reads the maximum current values measured since the last device reset. Note: The resolution of the minimum current value is 160mA so the value is rounded to the nearest 160mA.
+
+#### Returns
+The maximum current values in milli amperes (mA).
-### `averageTemperature`
+### `resetMaximumMinimumCurrent`
```cpp
-int averageTemperature()
+bool resetMaximumMinimumCurrent()
```
-Reads the average temperature of the battery.
+Resets the minimum and maximum current values.
+
+#### Returns
+True if the minimum and maximum current values were successfully reset, false otherwise.
+
+
+### `power`
+
+```cpp
+int16_t power()
+```
+
+Reads the current power of the battery in milliwatts (mW). This value is calculated based on the current and voltage of the battery.
+
+#### Returns
+The current power in milliwatts (mW).
+
+
+### `averagePower`
+
+```cpp
+int16_t averagePower()
+```
+
+Reads an average of power readings of the battery in milliwatts (mW). This value is calculated based on the current and voltage of the battery.
+
+#### Returns
+The average power in milliwatts (mW).
+
+
+### `internalTemperature`
+
+```cpp
+uint8_t internalTemperature()
+```
+
+Reads the current temperature of the internal die of the battery gauge chip.
#### Returns
The current temperature in degrees Celsius.
-### `percentage`
+### `averageInternalTemperature`
+
+```cpp
+uint8_t averageInternalTemperature()
+```
+
+Reads an average of internal temperature readings of the battery. Note: If the battery temperature was read before, this function will change the configuration to read the internal temperature. You will have to await a couple of temperature readings before getting a meaningful average temperature.
+
+#### Returns
+The average temperature in degrees Celsius.
+
+
+### `percentage`
```cpp
-int percentage()
+uint8_t percentage()
```
Reads the battery's state of charge (SOC). This value is based on both the voltage and the current of the battery as well as compensation for the battery's age and temperature and discharge rate.
#### Returns
-The state of charge as a percentage.
+The state of charge as a percentage (Range: 0% - 100%).
-### `remainingCapacity`
+### `remainingCapacity`
```cpp
-int remainingCapacity()
+uint16_t remainingCapacity()
```
-Reads the remaining capacity of the battery.
+Reads the remaining capacity of the battery. In combination with [current()](#class_battery_1addc7658b5425f6bfabb8e55c7f73fd33), this value can be used to estimate the remaining time until the battery is empty.
#### Returns
The remaining capacity in milliampere-hours (mAh).
+### `fullCapacity`
+
+```cpp
+uint16_t fullCapacity()
+```
+
+Returns the full capacity of the battery. For this to work, the capacity of the battery must be set when initializing the battery object.
+#### Returns
+The full capacity of the battery.
+
+
+### `isEmpty`
+
+```cpp
+bool isEmpty()
+```
+
+Checks if the battery is empty. Returns false once the cell voltage rises above the recovery threshold.
+
+#### Returns
+true if the battery is empty, false otherwise.
+
+
+### `timeToEmpty`
+
+```cpp
+int32_t timeToEmpty()
+```
+
+Calculates the estimated time until the battery is empty.
+#### Returns
+The estimated time until the battery is empty, in seconds. If the battery is charging, the function returns -1.
+
+
+### `timeToFull`
+
+```cpp
+int32_t timeToFull()
+```
+
+Calculates the estimated time until the battery is fully charged. The value is determined by learning from the experience of prior charge cycles.
+#### Returns
+The estimated time until the battery is fully charged in seconds. If the battery is discharging, the function returns -1.
+
+
# class `Board`
+Represents a board with power management capabilities.
+
+The [Board](#class_board) class provides methods to check the power source, enable/disable power rails, set voltage levels, enable/disable wakeup from pins or RTC, put the device into sleep mode for a specified duration, and control peripherals' power.
+
+Supported boards: Arduino Portenta H7, Arduino Portenta C33, Arduino Nicla Vision.
+
## Summary
Members | Descriptions
--------------------------------|---------------------------------------------
-| [`Board`](#class_board_1a9ee491d4fea680cf69b033374a9fdfcb) | Default constructor for the [Board](#class_board) class. |
-| [`Board`](#class_board_1a46e7c2305b38070b01a5714449021b5c) | Constructor for the [Board](#class_board) class with a PF1550 PMIC instance. |
+| [`Board`](#class_board_1a9ee491d4fea680cf69b033374a9fdfcb) | Construct a new [Board](#class_board) object. |
+| [`~Board`](#class_board_1af73f45730119a1fd8f6670f53f959e68) | Destroy the [Board](#class_board) object. |
+| [`begin`](#class_board_1a7cd62c2a663226bb02c87675e947ade0) | Initializes the board by initiating the PMIC. |
| [`isUSBPowered`](#class_board_1aa53bea8ac0404de8a7389484a61937ae) | Check if the board is powered through USB. |
| [`isBatteryPowered`](#class_board_1a80a62c172bea4a16b6983f204380f92b) | Check if the board is powered by the battery. |
-| [`setExternalPowerEnabled`](#class_board_1a336acc6fbe5c9d3544a14bc47afc0fc8) | Set the voltage for the external power rail. This lane powers the pin labeled 3V3 on the board. |
+| [`setExternalPowerEnabled`](#class_board_1a336acc6fbe5c9d3544a14bc47afc0fc8) | Enables/disables the voltage on the external power rail. This lane powers the pin labeled 3V3 on the board. |
| [`setExternalVoltage`](#class_board_1ad92e1939e565023016b210ce6aae68b6) | Set the voltage for the external power rail. This lane powers the pin labeled 3V3 on the board. |
-| [`setCameraPowerEnabled`](#class_board_1ad02a62c1b376df7523751fa4b3207204) | Set the camera power rail switch direction on boards with a built-in camera. |
-| [`enableWakeupFromPin`](#class_board_1a94ac54f76a7e8fff5b7c6523af64169a) | Enables wake-up of the device from a specified pin (A0, A1, A2, A3, A4, A5, D4, D7 ) |
-| [`enableWakeupFromRTC`](#class_board_1ae158d0367a2851d1f1f560bcca784412) | Enables wake-up of the device from the RTC. |
-| [`sleepFor`](#class_board_1a966bcfa00c60eaf3b0a1aa89d1deea9d) | Put the device in sleep mode for a specified amount of time. |
-| [`sleepFor`](#class_board_1a31c46d510bbf14e372e019b8789afd3b) | Put the device in sleep mode for a specified amount of time. |
-| [`sleepUntilWakeupEvent`](#class_board_1a1d23524e0bfeb7282fa465f3834027e1) | Put the device into sleep mode until a wakeup event occurs. This sleep mode is ideal for applications requiring periodic wake-ups or brief intervals of inactivity and reduces consumption to a range between 6mA and 18mA depending on the state of the peripherals. This sleep mode resumes the operation from the last operation. A wakeup event can be an interrupt on a pin or the RTC, depending on what you set with [enableWakeupFromPin()](#class_board_1a94ac54f76a7e8fff5b7c6523af64169a) and [enableWakeupFromRTC()](#class_board_1ae158d0367a2851d1f1f560bcca784412). |
-| [`deepSleepUntilWakeupEvent`](#class_board_1aa0f7c55bf12f52374a2694aff110836b) | Put the device into deep sleep mode until a wakeup event occurs. For scenarios demanding drastic power conservation, the Deep Sleep Mode significantly reduces the board's power usage to range between 90uA and 11mA depending on the state of the peripherals. This mode restarts the board on wakeup, effectively running the setup() function again. A wakeup event can be an interrupt on a pin or the RTC, depending on what you set with [enableWakeupFromPin()](#class_board_1a94ac54f76a7e8fff5b7c6523af64169a) and [enableWakeupFromRTC()](#class_board_1ae158d0367a2851d1f1f560bcca784412). |
-| [`setAllPeripheralsPower`](#class_board_1a27dcc0b9d69a8cce256494192f2efb3a) | Turn the peripherals on Portenta C33 (ADC, RGB LED, Secure Element, Wifi and Bluetooth) off. |
-| [`setCommunicationPeripheralsPower`](#class_board_1ac91aa31be1ea833d7266dda45dd1c5f2) | Set the communication power rail switch direction on Portenta C33 (Wifi, Bluetooth and Secure Element) |
-| [`setAnalogDigitalConverterPower`](#class_board_1a3d9fbb30b03c3a7f733f0c89dd9dc43d) | Set the analog digital converter power rail switch direction on Portenta C33. |
-| [`setReferenceVoltage`](#class_board_1a8feb9efc5439c8fec5139f66484200b5) | Set the reference voltage on Portenta C33. This value is used by the ADC to convert analog values to digital values. This can be particularly useful to increase the accuracy of the ADC when working with low voltages. |
+| [`setCameraPowerEnabled`](#class_board_1ad02a62c1b376df7523751fa4b3207204) | Enables/disables the camera's power rail on boards with a built-in camera. |
+| [`enableWakeupFromPin`](#class_board_1ae04b853e945b07852a65fb4f0e7e7d2b) | Enables wakeup from pin GPIO0 on Portenta H7. The pin is only accessible via high-density connectors. |
+| [`enableSleepWhenIdle`](#class_board_1ae4c9772a307f85306102cf4333ecf249) | Enables sleep mode when the board is idle. |
+| [`enableWakeupFromPin`](#class_board_1a94ac54f76a7e8fff5b7c6523af64169a) | Enables wake-up of the device from a specified pin (A0, A1, A2, A3, A4, A5, D4, D7 ) on Arduino Portenta C33. |
+| [`enableWakeupFromRTC`](#class_board_1a5fc9e67d4e42ce7943b9675c17fd77f6) | Enables wake-up of the device from the RTC. This function allows to use a custom RTC instance to put the device in sleep mode. |
+| [`enableWakeupFromRTC`](#class_board_1a49925de689c2f73f49b09d7b190e5036) | Enables wake-up of the device from the RTC. |
+| [`enableWakeupFromRTC`](#class_board_1a27a7db805596399daf0e89de755eca0c) | Enables wake-up of the device from the RTC. |
+| [`sleepUntilWakeupEvent`](#class_board_1a1d23524e0bfeb7282fa465f3834027e1) | Put the device into sleep mode until a wakeup event occurs This sleep mode is ideal for applications requiring periodic wake-ups or brief intervals of inactivity and reduces consumption to a range between 6mA and 18mA depending on the state of the peripherals. This sleep mode resumes the operation from the last operation without resetting the board. A wakeup event can be an interrupt on a pin or the RTC, depending on what you set with [enableWakeupFromPin()](#class_board_1ae04b853e945b07852a65fb4f0e7e7d2b) and [enableWakeupFromRTC()](#class_board_1a5fc9e67d4e42ce7943b9675c17fd77f6). |
+| [`standByUntilWakeupEvent`](#class_board_1a7dda3836bbe5a11628d4d8a122529ded) | Put the device into standby mode until a wakeup event occurs. For scenarios demanding drastic power conservation, the standby Mode significantly reduces the board's power usage to micro amperes range depending on the state of the peripherals. This mode restarts the board on wake-up, effectively running the setup() function again. A wakeup event can be an interrupt on a pin or the RTC, depending on what you set with [enableWakeupFromPin()](#class_board_1ae04b853e945b07852a65fb4f0e7e7d2b) and [enableWakeupFromRTC()](#class_board_1a5fc9e67d4e42ce7943b9675c17fd77f6). |
+| [`setAllPeripheralsPower`](#class_board_1a27dcc0b9d69a8cce256494192f2efb3a) | Toggle the peripherals' power on Portenta C33 (ADC, RGB LED, Secure Element, Wifi and Bluetooth). |
+| [`setCommunicationPeripheralsPower`](#class_board_1ac91aa31be1ea833d7266dda45dd1c5f2) | Toggles the communication peripherials' power on Portenta C33 (Wifi, Bluetooth and Secure Element) |
+| [`setAnalogDigitalConverterPower`](#class_board_1a3d9fbb30b03c3a7f733f0c89dd9dc43d) | Toggles the power of the analog digital converter on Portenta C33. This is not available on the Portenta H7. |
+| [`setReferenceVoltage`](#class_board_1a8feb9efc5439c8fec5139f66484200b5) | Set the reference voltage. This value is used by the ADC to convert analog values to digital values. This can be particularly useful to increase the accuracy of the ADC when working with low voltages. |
+| [`shutDownFuelGauge`](#class_board_1ae4af8f64cc1389bc0b640124dbb0d9c8) | Shuts down the fuel gauge to reduce power consumption. The IC returns to active mode on any edge of any communication line. If the IC is power-cycled or the software RESET command is sent the IC returns to active mode of operation. |
## Members
@@ -209,20 +371,30 @@ The remaining capacity in milliampere-hours (mAh).
Board()
```
-Default constructor for the [Board](#class_board) class.
+Construct a new [Board](#class_board) object.
-### `Board`
+### `~Board`
```cpp
-Board(PF1550 * pmic)
+~Board()
```
-Constructor for the [Board](#class_board) class with a PF1550 PMIC instance.
+Destroy the [Board](#class_board) object.
-#### Parameters
-* `pmic` Pointer to the PF1550 PMIC instance.
+
+
+### `begin`
+
+```cpp
+bool begin()
+```
+
+Initializes the board by initiating the PMIC.
+
+#### Returns
+true if the board initialization is successful, false otherwise.
### `isUSBPowered`
@@ -255,7 +427,7 @@ True if powered by the battery, false otherwise.
void setExternalPowerEnabled(bool on)
```
-Set the voltage for the external power rail. This lane powers the pin labeled 3V3 on the board.
+Enables/disables the voltage on the external power rail. This lane powers the pin labeled 3V3 on the board.
#### Parameters
* `on` True to enable this power rail, false to disable it.
@@ -268,10 +440,10 @@ bool setExternalVoltage(float voltage)
Set the voltage for the external power rail. This lane powers the pin labeled 3V3 on the board.
#### Parameters
-* `voltage` float value of the voltage value to set. `voltage` has to be one of the following (1.10, 1.20, 1.35, 1.50, 1.80, 2.50, 3.00 and 3.30)
+* `voltage` float value of the voltage value to set. Value has to be one of the following (1.10, 1.20, 1.35, 1.50, 1.80, 2.50, 3.00, 3.30)
#### Returns
-True if successful, false otherwise.
+True the voltage was set successfully, false otherwise.
### `setCameraPowerEnabled`
@@ -280,10 +452,28 @@ True if successful, false otherwise.
void setCameraPowerEnabled(bool enabled)
```
-Set the camera power rail switch direction on boards with a built-in camera.
+Enables/disables the camera's power rail on boards with a built-in camera.
#### Parameters
-* `enabled` True to turn on the switches, false to turn them off.
+* `enabled` True to turn on the camera, false to turn it off.
+
+
+### `enableWakeupFromPin`
+
+```cpp
+void enableWakeupFromPin()
+```
+
+Enables wakeup from pin GPIO0 on Portenta H7. The pin is only accessible via high-density connectors.
+
+
+### `enableSleepWhenIdle`
+
+```cpp
+void enableSleepWhenIdle()
+```
+
+Enables sleep mode when the board is idle.
### `enableWakeupFromPin`
@@ -292,29 +482,43 @@ Set the camera power rail switch direction on boards with a built-in camera.
void enableWakeupFromPin(uint8_t pin, PinStatus direction)
```
-Enables wake-up of the device from a specified pin (A0, A1, A2, A3, A4, A5, D4, D7 )
+Enables wake-up of the device from a specified pin (A0, A1, A2, A3, A4, A5, D4, D7 ) on Arduino Portenta C33.
#### Parameters
* `pin` The pin number used for waking up the device.
* `direction` The direction of the interrupt that will wake up the device. (RISING, FALLING)
-### `enableWakeupFromRTC`
+### `enableWakeupFromRTC`
```cpp
-void enableWakeupFromRTC()
+bool enableWakeupFromRTC(uint32_t hours, uint32_t minutes, uint32_t seconds, void(*)() callbackFunction, RTClock * rtc)
```
-Enables wake-up of the device from the RTC.
+Enables wake-up of the device from the RTC. This function allows to use a custom RTC instance to put the device in sleep mode.
+
+#### Parameters
+* `hours` The number of hours to sleep.
+
+* `minutes` The number of minutes to sleep.
+
+* `seconds` The number of seconds to sleep.
+
+* `callbackFunction` The function to call when the device wakes up. If no callback function is provided, the device will wake up without calling any function.
+
+* `rtc` The RTC instance to use for the sleep function. If no RTC instance is provided, the default RTC instance is used.
+
+#### Returns
+True if successful, false otherwise.
-### `sleepFor`
+### `enableWakeupFromRTC`
```cpp
-bool sleepFor(int hours, int minutes, int seconds, void(*)() callbackFunction, RTClock * rtc)
+bool enableWakeupFromRTC(uint32_t hours, uint32_t minutes, uint32_t seconds, RTClock * rtc)
```
-Put the device in sleep mode for a specified amount of time.
+Enables wake-up of the device from the RTC.
#### Parameters
* `hours` The number of hours to sleep.
@@ -323,22 +527,19 @@ Put the device in sleep mode for a specified amount of time.
* `seconds` The number of seconds to sleep.
-* `callbackFunction` The function to call when the device wakes up.
-
-* `RTC` The RTC instance to use for the sleep function.
+* `rtc` The RTC instance to use for the sleep function. Default is the shared RTC instance.
#### Returns
True if successful, false otherwise.
-### `sleepFor`
+### `enableWakeupFromRTC`
```cpp
-bool sleepFor(int hours, int minutes, int seconds, void(*)() callbackFunction)
+bool enableWakeupFromRTC(uint32_t hours, uint32_t minutes, uint32_t seconds)
```
-Put the device in sleep mode for a specified amount of time.
-
+Enables wake-up of the device from the RTC.
#### Parameters
* `hours` The number of hours to sleep.
@@ -346,8 +547,6 @@ Put the device in sleep mode for a specified amount of time.
* `seconds` The number of seconds to sleep.
-* `callbackFunction` The function to call when the device wakes up.
-
#### Returns
True if successful, false otherwise.
@@ -358,16 +557,16 @@ True if successful, false otherwise.
void sleepUntilWakeupEvent()
```
-Put the device into sleep mode until a wakeup event occurs. This sleep mode is ideal for applications requiring periodic wake-ups or brief intervals of inactivity and reduces consumption to a range between 6mA and 18mA depending on the state of the peripherals. This sleep mode resumes the operation from the last operation. A wakeup event can be an interrupt on a pin or the RTC, depending on what you set with [enableWakeupFromPin()](#class_board_1a94ac54f76a7e8fff5b7c6523af64169a) and [enableWakeupFromRTC()](#class_board_1ae158d0367a2851d1f1f560bcca784412).
+Put the device into sleep mode until a wakeup event occurs This sleep mode is ideal for applications requiring periodic wake-ups or brief intervals of inactivity and reduces consumption to a range between 6mA and 18mA depending on the state of the peripherals. This sleep mode resumes the operation from the last operation without resetting the board. A wakeup event can be an interrupt on a pin or the RTC, depending on what you set with [enableWakeupFromPin()](#class_board_1ae04b853e945b07852a65fb4f0e7e7d2b) and [enableWakeupFromRTC()](#class_board_1a5fc9e67d4e42ce7943b9675c17fd77f6).
-### `deepSleepUntilWakeupEvent`
+### `standByUntilWakeupEvent`
```cpp
-void deepSleepUntilWakeupEvent()
+void standByUntilWakeupEvent()
```
-Put the device into deep sleep mode until a wakeup event occurs. For scenarios demanding drastic power conservation, the Deep Sleep Mode significantly reduces the board's power usage to range between 90uA and 11mA depending on the state of the peripherals. This mode restarts the board on wakeup, effectively running the setup() function again. A wakeup event can be an interrupt on a pin or the RTC, depending on what you set with [enableWakeupFromPin()](#class_board_1a94ac54f76a7e8fff5b7c6523af64169a) and [enableWakeupFromRTC()](#class_board_1ae158d0367a2851d1f1f560bcca784412).
+Put the device into standby mode until a wakeup event occurs. For scenarios demanding drastic power conservation, the standby Mode significantly reduces the board's power usage to micro amperes range depending on the state of the peripherals. This mode restarts the board on wake-up, effectively running the setup() function again. A wakeup event can be an interrupt on a pin or the RTC, depending on what you set with [enableWakeupFromPin()](#class_board_1ae04b853e945b07852a65fb4f0e7e7d2b) and [enableWakeupFromRTC()](#class_board_1a5fc9e67d4e42ce7943b9675c17fd77f6).
### `setAllPeripheralsPower`
@@ -376,8 +575,10 @@ Put the device into deep sleep mode until a wakeup event occurs. For scenarios d
void setAllPeripheralsPower(bool on)
```
-Turn the peripherals on Portenta C33 (ADC, RGB LED, Secure Element, Wifi and Bluetooth) off.
+Toggle the peripherals' power on Portenta C33 (ADC, RGB LED, Secure Element, Wifi and Bluetooth).
+#### Parameters
+* `on` True to turn on the power, false to turn it off.
### `setCommunicationPeripheralsPower`
@@ -386,10 +587,10 @@ Turn the peripherals on Portenta C33 (ADC, RGB LED, Secure Element, Wifi and Blu
void setCommunicationPeripheralsPower(bool on)
```
-Set the communication power rail switch direction on Portenta C33 (Wifi, Bluetooth and Secure Element)
+Toggles the communication peripherials' power on Portenta C33 (Wifi, Bluetooth and Secure Element)
#### Parameters
-* `on` True to turn on the switches, false to turn them off.
+* `on` True to turn on the power, false to turn it off.
### `setAnalogDigitalConverterPower`
@@ -398,10 +599,10 @@ Set the communication power rail switch direction on Portenta C33 (Wifi, Bluetoo
void setAnalogDigitalConverterPower(bool on)
```
-Set the analog digital converter power rail switch direction on Portenta C33.
+Toggles the power of the analog digital converter on Portenta C33. This is not available on the Portenta H7.
#### Parameters
-* `on` True to turn on the switches, false to turn them off.
+* `on` True to turn on the power, false to turn it off.
### `setReferenceVoltage`
@@ -410,32 +611,46 @@ Set the analog digital converter power rail switch direction on Portenta C33.
bool setReferenceVoltage(float voltage)
```
-Set the reference voltage on Portenta C33. This value is used by the ADC to convert analog values to digital values. This can be particularly useful to increase the accuracy of the ADC when working with low voltages.
+Set the reference voltage. This value is used by the ADC to convert analog values to digital values. This can be particularly useful to increase the accuracy of the ADC when working with low voltages.
#### Parameters
-* `voltage` float value of the voltage value to set. It can be any value between 1.80V and 3.30V in steps of 0.10V. Any value outside this range or with different steps will not be accepted by the library.
+* `voltage` Reference voltage value in volts. It can be anything between 1.80V and 3.30V in steps of 0.10V. Any value outside this range or with different steps will not be accepted by the library.
#### Returns
-True if successful, false otherwise.
+True if the voltage was set successfully, false otherwise.
+
+
+### `shutDownFuelGauge`
+
+```cpp
+void shutDownFuelGauge()
+```
+
+Shuts down the fuel gauge to reduce power consumption. The IC returns to active mode on any edge of any communication line. If the IC is power-cycled or the software RESET command is sent the IC returns to active mode of operation.
+
# class `Charger`
-[Charger](#class_charger) class for controlling charging parameters and monitoring charging status.
+Class for controlling charging parameters and monitoring charging status.
## Summary
Members | Descriptions
--------------------------------|---------------------------------------------
-| [`Charger`](#class_charger_1a386eef9a5c151f3e5eb3ee67a0aeb0cb) | Default constructor. |
-| [`Charger`](#class_charger_1a941c1c93e7cca4055cb1b85c19c43824) | Constructor with PMIC instance. |
-| [`setChargeCurrent`](#class_charger_1a5e2414a885c3d48a4767c725c1f734bb) | Set the charging current. |
-| [`setChargeVoltage`](#class_charger_1aa3c52bef06f8d1069cc10b1829e4e878) | Set the charging voltage. |
-| [`setEndOfChargeCurrent`](#class_charger_1a9a68b14cc28c160ba366cfc4eda4d0a0) | Set the end-of-charge current. |
-| [`setInputCurrentLimit`](#class_charger_1ab4475b311be03071cf05b3c4ecfa9203) | The input current limit (ILIM) safeguards the device by preventing overcurrent, ensuring the charging current is within safe levels for the battery, and adapting to the maximum current the power source can provide, allowing you to charge and use the system at the same time. |
-| [`getChargeStatus`](#class_charger_1a0c1c368e7b7cef05f9491efc4a576cb8) | Get the current charging status. |
-| [`enable`](#class_charger_1a6e7a92f5fb4ae1f016ff13d5c716a81f) | Enables the charging functionality with either the default settings or the last saved parameters, depending on what was set previously. |
-| [`disable`](#class_charger_1aa87840314777bb23a58cbead63407707) | Disable the charging functionality. |
+| [`Charger`](#class_charger_1a386eef9a5c151f3e5eb3ee67a0aeb0cb) | Constructs a new [Charger](#class_charger) object. |
+| [`begin`](#class_charger_1af3ebf5b1bbd6c4909f47217b83fe57ab) | Initializes the charger by initiating the PMIC. |
+| [`setChargeCurrent`](#class_charger_1a7092cf5385bf469d3b27204478fb1671) | Set the charging current. The default charging current is set to 100mA. |
+| [`getChargeCurrent`](#class_charger_1a3ff22dda98f766f42a3a7fdfc46d7a41) | Get the charge current in milli amperes (mA). |
+| [`setChargeVoltage`](#class_charger_1a46cee977438a93ef66ed3882d741efbc) | Set the charging voltage in volts (V). The current charging voltage is set to 4.2V by default. |
+| [`getChargeVoltage`](#class_charger_1af478d3be4756b758238823696c1a00c8) | Get the charge voltage in volts (V). |
+| [`setEndOfChargeCurrent`](#class_charger_1a9b54c1077cc45ed826b8269ff57a3ee2) | Set the end-of-charge current. The charger IC determines when to terminate the charge cycle based on the current going into the battery dropping below the given threshold during the constant voltage phase. At this point, the battery is considered fully charged and charging is completed. If charge termination is disabled, the charge current will naturally decay to 0mA, but this is rarely done in practice. This is because the amount of charge going into the battery exponentially decreases during CV charging, and it would take a significantly longer time to recharge the battery with a very little increase in capacity. |
+| [`getEndOfChargeCurrent`](#class_charger_1ae74b5ab591bd666c47cd133d2855152c) | Get the end of charge current. |
+| [`setInputCurrentLimit`](#class_charger_1a1c4b5f61bd84e067c2643a0da1ccd1a7) | The input current limit (ILIM) safeguards the device by preventing overcurrent, ensuring the charging current is within safe levels for the battery, and adapting to the maximum current the power source can provide, allowing you to charge and use the system at the same time. The default input current limit is set to 1.5A. |
+| [`getInputCurrentLimit`](#class_charger_1a768963364778f838e4b44463c020b173) | Get the input current limit. It is a safeguard to prevent overcurrent when charging respectively to the maximum current the power source can provide. |
+| [`getState`](#class_charger_1a4670cf2d22eb36216e7ef2b65077021a) | Get the current charging status. |
+| [`isEnabled`](#class_charger_1a908179315a74d96f27fbb86858ae4892) | Checks if the charger and thus charging is enabled. By default, the charger is enabled. |
+| [`setEnabled`](#class_charger_1a4db5462b2061801340f022f2cd35e6c0) | Sets the enabled state of the charger. When enabling it uses the default settings or the last saved parameters, depending on what was set previously. |
## Members
@@ -445,186 +660,336 @@ True if successful, false otherwise.
Charger()
```
-Default constructor.
+Constructs a new [Charger](#class_charger) object.
-### `Charger`
+### `begin`
```cpp
-Charger(PF1550 * pmic)
+bool begin()
```
-Constructor with PMIC instance.
+Initializes the charger by initiating the PMIC.
-#### Parameters
-* `pmic` Pointer to the PF1550 PMIC instance.
+#### Returns
+true if the charger initialization is successful, false otherwise.
-### `setChargeCurrent`
+### `setChargeCurrent`
```cpp
-void setChargeCurrent(ChargeCurrent current)
+bool setChargeCurrent(uint16_t current)
```
-Set the charging current.
+Set the charging current. The default charging current is set to 100mA.
#### Parameters
-* `current` Charging current enum value (ChargeCurrent).
+* `current` Charging current in milli amperes (mA). Supported values: 100, 150, 200, 250, 300, 350, 400, 450, 500, 550, 600, 650, 700, 750, 800, 850, 900, 950, 1000
+
+#### Returns
+True if successful, false if an invalid value was provided or if the PMIC communication failed.
+
+
+### `getChargeCurrent`
+
+```cpp
+uint16_t getChargeCurrent()
+```
+
+Get the charge current in milli amperes (mA).
+
+#### Returns
+The charge current in float.
-### `setChargeVoltage`
+### `setChargeVoltage`
```cpp
-void setChargeVoltage(ChargeVoltage voltage)
+bool setChargeVoltage(float voltage)
```
-Set the charging voltage.
+Set the charging voltage in volts (V). The current charging voltage is set to 4.2V by default.
#### Parameters
-* `voltage` Charging voltage enum value (ChargeVoltage).
+* `voltage` Charging voltage in volts (V). Supported values: 3.50, 3.52, 3.54, 3.56, 3.58, 3.60, 3.62, 3.64, 3.66, 3.68, 3.70, 3.72, 3.74, 3.76, 3.78, 3.80, 3.82, 3.84, 3.86, 3.88, 3.90, 3.92, 3.94, 3.96, 3.98, 4.00, 4.02, 4.04, 4.06, 4.08, 4.10, 4.12, 4.14, 4.16, 4.18, 4.20, 4.22, 4.24, 4.26, 4.28, 4.30, 4.32, 4.34, 4.36, 4.38, 4.40, 4.42, 4.44
+
+#### Returns
+True if successful, false if an invalid value was provided or if the PMIC communication failed.
-### `setEndOfChargeCurrent`
+### `getChargeVoltage`
```cpp
-void setEndOfChargeCurrent(EndOfChargeCurrent current)
+float getChargeVoltage()
```
-Set the end-of-charge current.
+Get the charge voltage in volts (V).
+
+#### Returns
+The charge voltage as a float value.
+
+
+### `setEndOfChargeCurrent`
+
+```cpp
+bool setEndOfChargeCurrent(uint16_t current)
+```
+
+Set the end-of-charge current. The charger IC determines when to terminate the charge cycle based on the current going into the battery dropping below the given threshold during the constant voltage phase. At this point, the battery is considered fully charged and charging is completed. If charge termination is disabled, the charge current will naturally decay to 0mA, but this is rarely done in practice. This is because the amount of charge going into the battery exponentially decreases during CV charging, and it would take a significantly longer time to recharge the battery with a very little increase in capacity.
#### Parameters
-* `current` End-of-charge current enum value (EndOfChargeCurrent).
+* `current` End-of-charge current in milli amperes (mA). The default end-of-charge current is set to 5 mA. Supported values: 5, 10, 20, 30, 50
+
+#### Returns
+True if successful, false if an invalid value was provided or if the PMIC communication failed.
-### `setInputCurrentLimit`
+### `getEndOfChargeCurrent`
```cpp
-void setInputCurrentLimit(InputCurrentLimit current)
+uint16_t getEndOfChargeCurrent()
```
-The input current limit (ILIM) safeguards the device by preventing overcurrent, ensuring the charging current is within safe levels for the battery, and adapting to the maximum current the power source can provide, allowing you to charge and use the system at the same time.
+Get the end of charge current.
+
+This function returns the current value at which the charging process is considered complete. Charging is terminated when the supplied current drops below the pre-programmed end of charge level.
+
+#### Returns
+The end of charge current.
+
+
+### `setInputCurrentLimit`
+
+```cpp
+bool setInputCurrentLimit(uint16_t current)
+```
+
+The input current limit (ILIM) safeguards the device by preventing overcurrent, ensuring the charging current is within safe levels for the battery, and adapting to the maximum current the power source can provide, allowing you to charge and use the system at the same time. The default input current limit is set to 1.5A.
#### Parameters
-* `current` Maximum input current enum value (InputCurrentLimit).
+* `current` Maximum input current in milli amperes (mA). Supported values: 10, 15, 20, 25, 30, 35, 40, 45, 50, 100, 150, 200, 300, 400, 500, 600, 700, 800, 900, 1000, 1500
+
+#### Returns
+True if successful, false if an invalid value was provided or if the PMIC communication failed.
+
+
+### `getInputCurrentLimit`
+
+```cpp
+uint16_t getInputCurrentLimit()
+```
+
+Get the input current limit. It is a safeguard to prevent overcurrent when charging respectively to the maximum current the power source can provide.
+
+#### Returns
+The input current limit in milli amperes (mA).
-### `getChargeStatus`
+### `getState`
```cpp
-ChargeStatus getChargeStatus()
+ChargingState getState()
```
Get the current charging status.
#### Returns
-Charging status enum value (ChargeStatus).
+Charging status enum value (ChargingState). The possible states are:
+
+* none: Provided by the registers, not used in this API.
+
+* preCharge: First stage of the charging process, prepares battery for the charging process.
+
+* fastChargeConstantCurrent: Second phase of the charging process where the battery is charging in constant current mode until it reaches the voltage where the it's considered fully charged. (4.2V)
+
+* fastChargeConstantVoltage: Third phase of the charging process where the battery is kept at the fully charged voltage and current is slowly decreased to the end of charge current.
+
+* endOfCharge: If the battery is still connected, the charger will ensure it's kept at 4.2V by topping up the voltage to avoid self discharge.
+
+* done: [Battery](#class_battery) is fully charged
+
+* timerFaultError: The timer that is monitoring the charge status has encountered an error.
+
+* thermistorSuspendError: Charging was suspended due to overheating
+
+* chargerDisabled: [Charger](#class_charger) is disabled
+
+* batteryOvervoltageError: Charging was suspended due to an overvoltage fault
+
+* chargerBypassed: The charger is bypassed completely and the USB voltage is powering the board
-### `enable`
+### `isEnabled`
```cpp
-bool enable()
+bool isEnabled()
```
-Enables the charging functionality with either the default settings or the last saved parameters, depending on what was set previously.
+Checks if the charger and thus charging is enabled. By default, the charger is enabled.
#### Returns
-True if successful, false otherwise.
+true if the charger is enabled, false otherwise.
-### `disable`
+### `setEnabled`
```cpp
-bool disable()
+bool setEnabled(bool enabled)
```
-Disable the charging functionality.
+Sets the enabled state of the charger. When enabling it uses the default settings or the last saved parameters, depending on what was set previously.
+
+#### Parameters
+* `enabled` The desired enabled state of the charger.
#### Returns
-True if successful, false otherwise.
+true if the enabled state was successfully set, false otherwise.
-# class `PowerManagement`
+# class `MAX1726Driver`
+
+Driver class for the MAX1726 Fuel Gauge IC.
## Summary
Members | Descriptions
--------------------------------|---------------------------------------------
-| [`PowerManagement`](#class_power_management_1acc41d5c24cf751f6924e62c4e602f5b3) | constructor for the [PowerManagement](#class_power_management) |
-| [`~PowerManagement`](#class_power_management_1a3d8e868a9d3eb39a971f1cfe901119df) | destructor for the [PowerManagement](#class_power_management) |
-| [`begin`](#class_power_management_1a65bcff4dceb0effedd04b20be2e6695e) | start communication with the PMIC chip and the power gauge. |
-| [`getBoard`](#class_power_management_1ad732d749ad09d03eff4523b617ec7e7f) | This class centralizes control over the power distribution within the board. It allows users to enable or disable specific power rails, and send the board into low-power modes. |
-| [`getBattery`](#class_power_management_1aec3b949e2c9904113a7c406ac7019e00) | Dedicated to battery management, this class enables real-time monitoring of battery usage and health. |
-| [`getCharger`](#class_power_management_1ae77d117118b803ba4d35132ab4d5270e) | Focused on battery charging dynamics, this class provides a detailed insight into charging parameters. |
+| [`chargingComplete`](#class_m_a_x1726_driver_1a9c7c3d11d9dddc7667eafba19c52e65f) | Checks if the battery charging is complete. |
+| [`setOperationMode`](#class_m_a_x1726_driver_1a13aeedba15e50b2fd2dada0a8ab0e5cd) | Sets the operation mode of the Fuel Gauge. |
+| [`MAX1726Driver`](#class_m_a_x1726_driver_1af68eee6cc8a3d2a9fbbb0097b55e7ec6) | Constructs a new [MAX1726Driver](#class_m_a_x1726_driver) object. |
+| [`~MAX1726Driver`](#class_m_a_x1726_driver_1a29bb1df9c115d16da9e4ce3afc99a992) | |
## Members
-### `PowerManagement`
+### `chargingComplete`
```cpp
-PowerManagement()
+bool chargingComplete()
```
-constructor for the [PowerManagement](#class_power_management)
+Checks if the battery charging is complete.
+
+Checks if the charging process is complete.
+#### Returns
+true if the charging process is complete, false otherwise.
+
+#### Returns
+true if the charging is complete, false otherwise.
-### `~PowerManagement`
+### `setOperationMode`
```cpp
-~PowerManagement()
+bool setOperationMode(FuelGaugeOperationMode mode)
```
-destructor for the [PowerManagement](#class_power_management)
+Sets the operation mode of the Fuel Gauge.
+
+#### Parameters
+* `mode` The operation mode to set. Possible values are: hibernate, shutdown, active.
+#### Returns
+True if the operation mode was set successfully, false otherwise.
-### `begin`
+### `MAX1726Driver`
```cpp
-bool begin()
+MAX1726Driver(TwoWire * wire, uint8_t i2cAddress)
```
-start communication with the PMIC chip and the power gauge.
+Constructs a new [MAX1726Driver](#class_m_a_x1726_driver) object.
-#### Returns
-true if the initialization was successful, false otherwise
+#### Parameters
+* `wire` Pointer to the TwoWire object for I2C communication.
+
+* `i2cAddress` The I2C address of the MAX1726 device. The default value is 0x36.
-### `getBoard`
+### `~MAX1726Driver`
```cpp
-Board getBoard()
+~MAX1726Driver()
```
-This class centralizes control over the power distribution within the board. It allows users to enable or disable specific power rails, and send the board into low-power modes.
+
+
+# struct `BatteryCharacteristics`
+
+This struct contains the characteristics of the battery.
+
+## Summary
+
+ Members | Descriptions
+--------------------------------|---------------------------------------------
+| [`capacity`](#struct_battery_characteristics_1a6bd20a3ca22801553596234c7d80014c) | The battery's capacity in milliampere-hours (mAh). |
+| [`emptyVoltage`](#struct_battery_characteristics_1af8847c64e47bd1ee07a2234572658baf) | The voltage in volts (V) at which the battery is considered empty. If you don't know this value you can use the minimumVoltage() function to find out while you let the battery completely discharge. |
+| [`chargeVoltage`](#struct_battery_characteristics_1a1278657cc6c246d6545a3770d213cf91) | The voltage in volts (V) at which the battery is being charged. |
+| [`endOfChargeCurrent`](#struct_battery_characteristics_1a13c651b4da45ab04ec9935023257aec2) | The current in milli amperes (mA) that is used to keep the battery charged at the end of the charging process. |
+| [`ntcResistor`](#struct_battery_characteristics_1ab5b19a09ad5e5d61c1ad72bdf4de4fb3) | The NTC resistor value used in the battery pack (10K or 100K Ohm). |
+| [`recoveryVoltage`](#struct_battery_characteristics_1aff1e9cdf23f2a9ff9e23da138f1791b4) | Sets the voltage level for clearing empty detection. Once the cell voltage rises above this point, empty voltage detection is re-enabled. |
+
+## Members
+
+### `capacity`
+
+```cpp
+int capacity
+```
+
+The battery's capacity in milliampere-hours (mAh).
-#### Returns
-the [Board](#class_board) object.
-### `getBattery`
+### `emptyVoltage`
```cpp
-Battery getBattery()
+float emptyVoltage
```
-Dedicated to battery management, this class enables real-time monitoring of battery usage and health.
+The voltage in volts (V) at which the battery is considered empty. If you don't know this value you can use the minimumVoltage() function to find out while you let the battery completely discharge.
-#### Returns
-the [Battery](#class_battery) object.
-### `getCharger`
+### `chargeVoltage`
```cpp
-Charger getCharger()
+float chargeVoltage
```
-Focused on battery charging dynamics, this class provides a detailed insight into charging parameters.
+The voltage in volts (V) at which the battery is being charged.
+
+
+
+### `endOfChargeCurrent`
+
+```cpp
+int endOfChargeCurrent
+```
+
+The current in milli amperes (mA) that is used to keep the battery charged at the end of the charging process.
+
+
+
+### `ntcResistor`
+
+```cpp
+NTCResistor ntcResistor
+```
+
+The NTC resistor value used in the battery pack (10K or 100K Ohm).
+
+
+
+### `recoveryVoltage`
+
+```cpp
+float recoveryVoltage
+```
+
+Sets the voltage level for clearing empty detection. Once the cell voltage rises above this point, empty voltage detection is re-enabled.
-#### Returns
-the [Charger](#class_charger) object.
diff --git a/examples/Battery/Battery.ino b/examples/Battery/Battery.ino
index 0858c21..b0a00a9 100644
--- a/examples/Battery/Battery.ino
+++ b/examples/Battery/Battery.ino
@@ -1,4 +1,3 @@
-
/*
Battery Information Display Demo
@@ -38,13 +37,10 @@ void setup() {
while (!Serial);
delay(1000); // Delay to give time to load the Serial Monitor
- charger = Charger();
charger.begin();
+ Serial.println("* 🔌 Charger initialized.");
auto chargeVoltage = charger.getChargeVoltage();
auto endOfChargeCurrent = charger.getEndOfChargeCurrent();
- // charger.setChargeVoltage(4.2); // Set the charge voltage in V
- // charger.setEndOfChargeCurrent(5); // Set the end of charge current in mA
- Serial.println("* 🔌 Charger initialized.");
Serial.println("* ⚡️ Charge voltage: " + String(chargeVoltage) + " V");
Serial.println("* ⚡️ End of charge current: " + String(endOfChargeCurrent) + " mA");
@@ -99,7 +95,6 @@ void loop() {
if(batteryConnected){
Serial.println("* 🪫 Battery is empty: " + ( battery.isEmpty() ? String("Yes") : String("No")));
- Serial.println("* 💯 Charging complete: " + ( battery.chargingComplete() ? String("Yes") : String("No")));
Serial.println("* ⚡️ Voltage: " + String(battery.voltage()) + " V");
Serial.println("* ⚡️ Average Voltage: " + String(battery.averageVoltage()) + " V");
diff --git a/examples/Charger/Charger.ino b/examples/Charger/Charger.ino
index 6c8b425..45fcbde 100644
--- a/examples/Charger/Charger.ino
+++ b/examples/Charger/Charger.ino
@@ -1,9 +1,9 @@
/*
-Charger Demo
+ Charger Demo
-This sketch demonstrates how to write charging parameters,read charger state and monitor charging using the PowerManagement library:
-* In the setup() function, it sets the charging parameters
-* In the loop() functionit prints the battery's voltage, current, percentage and the charger's state allowing you to monitor charging.
+ This sketch demonstrates how to write charging parameters,read charger state and monitor charging using the PowerManagement library:
+ * In the setup() function, it sets the charging parameters
+ * In the loop() functionit prints the battery's voltage, current, percentage and the charger's state allowing you to monitor charging.
Requirements:
- Arduino Portenta C33, Arduino Portenta H7, Arduino Nicla Vision
@@ -11,24 +11,21 @@ This sketch demonstrates how to write charging parameters,read charger state and
- PowerManagement library (installable from the Arduino Library Manager)
Usage:
- 1. Install the required library:
- - Open the Arduino IDE.
- - Go to "Sketch" -> "Include Library" -> "Manage Libraries..."
- - Search for "PowerManagement" and install it.
+ 1. Connect a Battery to the board
+
2. Upload the Sketch:
- - Open the provided sketch in the Arduino IDE.
- - Select your board type and port from the "Tools" menu.
- - Click the "Upload" button to upload the sketch to your board.
+ - Open the provided sketch in the Arduino IDE.
+ - Select your board type and port from the "Tools" menu.
+ - Click the "Upload" button to upload the sketch to your board.
3. Monitor Serial Output:
- - Open the Serial Monitor in the Arduino IDE.
- - Set the baud rate to 115200.
- - You will see the sketch continuously printing battery status and charger state.
+ - Open the Serial Monitor in the Arduino IDE.
+ - Set the baud rate to 115200.
+ - You will see the sketch continuously printing charger state information.
*/
#include "Arduino_PowerManagement.h"
-Battery battery;
Charger charger;
// Charge current in mA, a safe value for most batteries is half the battery capacity
@@ -41,7 +38,6 @@ void setup() {
for (auto start = millis(); !Serial && millis() - start < 5000;);
delay(1000); // Delay to give time to load the Serial Monitor
- charger = Charger();
if(!charger.begin()){
Serial.println("Charger initialization failed.");
while (true);
@@ -75,34 +71,34 @@ String getChargerState(){
ChargingState status = charger.getState();
switch (status) {
- case ChargingState::PreCharge:
+ case ChargingState::preCharge:
return "precharge";
break;
- case ChargingState::FastChargeConstantCurrent:
+ case ChargingState::fastChargeConstantCurrent:
return "fast-charge constant current";
break;
- case ChargingState::FastChargeConstantVoltage:
+ case ChargingState::fastChargeConstantVoltage:
return "fast-charge constant voltage";
break;
- case ChargingState::EndOfCharge:
+ case ChargingState::endOfCharge:
return "end-of-charge";
break;
- case ChargingState::Done:
+ case ChargingState::done:
return "done";
break;
- case ChargingState::TimerFaultError:
+ case ChargingState::timerFaultError:
return "timer fault";
break;
- case ChargingState::ThermistorSuspendError:
+ case ChargingState::thermistorSuspendError:
return "thermistor suspend";
break;
- case ChargingState::ChargerDisabled:
+ case ChargingState::chargerDisabled:
return "off";
break;
- case ChargingState::BatteryOvervoltageError:
+ case ChargingState::batteryOvervoltageError:
return "overvoltage condition";
break;
- case ChargingState::ChargerBypassed:
+ case ChargingState::chargerBypassed:
return "disabled";
break;
default:
@@ -112,7 +108,7 @@ String getChargerState(){
}
void loop(){
- static ChargingState status = ChargingState::None;
+ static ChargingState status = ChargingState::none;
if (status != charger.getState()) {
status = charger.getState();
diff --git a/examples/DeepSleep_WakeFromPin/DeepSleep_WakeFromPin.ino b/examples/DeepSleep_WakeFromPin/DeepSleep_WakeFromPin.ino
deleted file mode 100644
index be4fe85..0000000
--- a/examples/DeepSleep_WakeFromPin/DeepSleep_WakeFromPin.ino
+++ /dev/null
@@ -1,56 +0,0 @@
-
-#include "Arduino.h"
-#include "Arduino_PowerManagement.h"
-
-
-#define WAKE_PIN A3
-#define SLEEP_PIN 0
-
-volatile bool sleepFlag = false;
-
-PowerManagement manager;
-Board board;
-Charger charger;
-
-void setup() {
-
-
-
- manager = PowerManagement();
- manager.begin();
- board = manager.getBoard();
- charger = manager.getCharger();
-
- attachInterrupt(digitalPinToInterrupt(SLEEP_PIN), goToSleep, RISING);
-
- #if defined(ARDUINO_PORTENTA_C33)
- board.enableWakeupFromPin(WAKE_PIN, RISING);
- #elif defined(ARDUINO_PORTENTA_H7_M7) || defined(ARDUINO_PORTENTA_H7_M4) || defined(ARDUINO_NICLA_VISION)
- board.enableWakeupFromPin();
- #endif
-
-
- board.setAllPeripheralsPower(true);
- charger.disable();
-
- pinMode(LEDB, OUTPUT);
-}
-
-void goToSleep(){
- sleepFlag = true;
-}
-
-void loop() {
- if(sleepFlag){
- sleepFlag = false;
-
- //board.setAllPeripheralsPower(false);
- board.deepSleepUntilWakeupEvent();
- } else {
-
- digitalWrite(LEDB, HIGH);
- delay(1000);
- digitalWrite(LEDB, LOW);
- delay(1000);
- }
-}
diff --git a/examples/DeepSleep_WakeFromRTC_C33/DeepSleep_WakeFromRTC_C33.ino b/examples/DeepSleep_WakeFromRTC_C33/DeepSleep_WakeFromRTC_C33.ino
deleted file mode 100644
index 22469cb..0000000
--- a/examples/DeepSleep_WakeFromRTC_C33/DeepSleep_WakeFromRTC_C33.ino
+++ /dev/null
@@ -1,42 +0,0 @@
-
-#include "Arduino.h"
-#include "Arduino_PowerManagement.h"
-#include "RTC.h"
-
-RTCTime initial_time(1, Month::JANUARY, 2000, 12, 10, 00, DayOfWeek::TUESDAY, SaveLight::SAVING_TIME_ACTIVE);
-
-LowPower lowPower;
-PowerManagement manager;
-Board board;
-Charger charger;
-
-void setup() {
- pinMode(LED_BUILTIN, OUTPUT);
- digitalWrite(LED_BUILTIN, LOW);
-
- RTC.begin();
-
- manager = PowerManagement();
- manager.begin();
- board = manager.getBoard();
-
- board.enableWakeupFromRTC();
- board.setAllPeripheralsPower(true);
-
-
- if (!RTC.isRunning()) {
- RTC.setTime(initial_time);
- }
-
- digitalWrite(LED_BUILTIN, HIGH);
- board.sleepFor(0, 0, 10);
-
- // Turn LED on to indicate the board is awake
- digitalWrite(LED_BUILTIN, LOW);
-}
-
-void loop(){
- //board.setAllPeripheralsPower(false);
- board.deepSleepUntilWakeupEvent();
-}
-
diff --git a/examples/DeepSleep_WakeFromRTC_H7/DeepSleep_WakeFromRTC_H7.ino b/examples/DeepSleep_WakeFromRTC_H7/DeepSleep_WakeFromRTC_H7.ino
deleted file mode 100644
index f4ed84f..0000000
--- a/examples/DeepSleep_WakeFromRTC_H7/DeepSleep_WakeFromRTC_H7.ino
+++ /dev/null
@@ -1,23 +0,0 @@
-#include "Arduino.h"
-#include "Arduino_PowerManagement.h"
-
-PowerManagement manager;
-Board board;
-
-
-void setup() {
- manager = PowerManagement();
- manager.begin();
- board = manager.getBoard();
- board.enableWakeupFromRTC();
- board.sleepFor(0, 0, 1);
-
- pinMode(LEDB, OUTPUT);
- digitalWrite(LEDB, LOW);
- board.setAllPeripheralsPower(false);
- board.deepSleepUntilWakeupEvent();
-}
-
-void loop() {
- // put your main code here, to run repeatedly:
-}
\ No newline at end of file
diff --git a/examples/Powershell/Powershell.ino b/examples/Powershell/Powershell.ino
deleted file mode 100644
index b9075b9..0000000
--- a/examples/Powershell/Powershell.ino
+++ /dev/null
@@ -1,238 +0,0 @@
-#include "PowerManagement.h"
-#include
-#include
-
-PowerManagement manager;
-Battery battery;
-Board board;
-Charger charger;
-
-
-std::vector splitString(String input) {
- std::vector args;
- int start = 0;
- int end = input.indexOf(' ');
- while (end >= 0) {
- args.push_back(input.substring(start, end));
- start = end + 1;
- end = input.indexOf(' ', start);
- }
- args.push_back(input.substring(start));
- return args;
-}
-
-
-void printChargerStatus(){
- ChargingState status = charger.getState();
-
- switch (status) {
- case ChargingState::PreCharge:
- Serial.println("precharge");
- // Additional code specific to precharge
- break;
- case ChargingState::FastChargeConstantCurrent:
- Serial.println("fast-charge constant current");
- // Additional code specific to fast-charge CC
- break;
- case ChargingState::FastChargeConstantVoltage:
- Serial.println("fast-charge constant voltage");
- // Additional code specific to fast-charge CV
- break;
- case ChargingState::EndOfCharge:
- Serial.println("end-of-charge");
- // Additional code specific to end-of-charge
- break;
- case ChargingState::Done:
- Serial.println("done");
- // Additional code specific to done
- break;
- case ChargingState::TimerFaultError:
- Serial.println("timer fault");
- // Additional code specific to timer fault
- break;
- case ChargingState::ThermistorSuspendError:
- Serial.println("thermistor suspend");
- // Additional code specific to thermistor suspend
- break;
- case ChargingState::ChargerDisabled:
- Serial.println("off");
- // Additional code specific to off
- break;
- case ChargingState::BatteryOvervoltageError:
- Serial.println("overvoltage condition");
- // Additional code specific to battery overvoltage condition
- break;
- case ChargingState::ChargerBypassed:
- Serial.println("disabled");
- // Additional code specific to linear only
- break;
- default:
- Serial.println("unknown");
- // Additional code for handling unknown status
- break;
- }
-}
-
-void status(){
-
- Serial.println("BOARD: \n--------------------------");
- Serial.print("* Powered by usb: "); Serial.println(board.isUSBPowered());
- Serial.print("* Powered by battery: "); Serial.println(board.isBatteryPowered());
- Serial.println();
-
- Serial.println("CHARGER: \n--------------------------");
- Serial.print("* Charger status: "); printChargerStatus();
- Serial.println();
-
- Serial.println("BATTERY: \n--------------------------");
- Serial.println(
- "* Voltage: " + String(battery.voltage()) + "mV \n" +
- "* Current: " + String(battery.current()) + "mA \n" +
- "* Percentage: " + String(battery.percentage()) + "% \n" +
- "* Remaining Capacity: " + String(battery.remainingCapacity()) + "mAh \n" +
- "* Temperature: " + String(battery.temperature()) + "\n" +
- "\n");
-}
-
-
-void setRailVoltage(std::vector args){
- String rail = args[1];
- float voltage = atof(args[2].c_str());
-
- if(rail == "C33_reference"){
- #if defined(ARDUINO_PORTENTA_C33)
- if(board.setReferenceVoltage(voltage)) Serial.println("Successfully changed reference voltage");
- else Serial.println("Failed to set reference voltage");
- #else
- Serial.println("Current board is not an arduino portenta c33");
- #endif
- } else if (rail == "C33_external"){
- #if defined(ARDUINO_PORTENTA_C33)
- if(board.setExternalVoltage(voltage)) Serial.println("Successfully set external voltage");
- else Serial.println("Failed to set external voltage");
- #else
- Serial.println("Current board is not an arduino portenta c33");
- #endif
-
- } else if (rail == "H7_external"){
- #if defined(ARDUINO_PORTENTA_H7_M7) || defined(ARDUINO_PORTENTA_H7_M4)
- board.setExternalVoltage(voltage);
- #else
- Serial.println("Current board is not an arduino portenta h7");
- #endif
-
- } else if (rail == "nicla_external"){
- #if defined(ARDUINO_PORTENTA_H7_M7) || defined(ARDUINO_PORTENTA_H7_M4)
- board.setExternalVoltage(voltage);
- #else
- Serial.println("Current board is not an arduino nicla vision");
- #endif
-
- }
-}
-
-void toggleRail(std::vector args){
- String rail = args[1];
- bool on = atoi(args[2].c_str()) == 1;
-
- if (rail == "C33_external"){
- #if defined(ARDUINO_PORTENTA_C33)
- board.setExternalPowerEnabled(on);
- #else
- Serial.println("Current board is not an arduino portenta c33");
- #endif
-
- } else if (rail == "C33_communication"){
- #if defined(ARDUINO_PORTENTA_C33)
- board.setCommunicationPeripheralsPower(on);
- #else
- Serial.println("Current board is not an arduino portenta c33");
- #endif
-
- } else if (rail == "H7_external"){
- #if defined(ARDUINO_PORTENTA_H7_M7) || defined(ARDUINO_PORTENTA_H7_M4)
- board.setExternalPowerEnabled(on);
- #else
- Serial.println("Current board is not an arduino portenta h7");
- #endif
-
- } else if (rail == "nicla_external"){
- #if defined(ARDUINO_NICLA_VISION)
- board.setExternalPowerEnabled(on);
- #else
- Serial.println("Current board is not an arduino nicla vision");
- #endif
-
- } else if (rail == "nicla_camera"){
- #if defined(ARDUINO_NICLA_VISION)
- board.setCameraPowerEnabled(on);
- #else
- Serial.println("Current board is not an arduino nicla vision");
- #endif
- }
-}
-
-void toggleCharger(std::vector args){
- bool on = atoi(args[1].c_str()) == 1;
- Serial.println(on);
-
-
- if(on){
- if(charger.enable()){
- Serial.println("> Charger enabled");
- } else {
- Serial.println("> Error enabling charger");
- }
-
- } else {
- charger.disable();
- Serial.println("> Charger disabled");
- }
-}
-
-
-
-void setup() {
- Serial.begin(115200);
- while (!Serial);
-
- manager = PowerManagement();
- manager.begin();
-
- battery = manager.getBattery();
- board = manager.getBoard();
- charger = manager.getCharger();
-
-
- #if !defined(ARDUINO_NICLA_VISION)
- charger.setChargeCurrent(0.2);
- charger.setChargeVoltage(4.2);
- charger.setEndOfChargeCurrent(0.005);
- #endif
-}
-
-void loop() {
- if (Serial.available() > 0) {
- String input = Serial.readString();
- input.trim();
- std::vector args = splitString(input);
-
- if (args.size() > 0) {
- String command = args[0];
- if (command == "toggle_rail") {
- toggleRail(args);
- } else if (command == "set_rail_voltage") {
- setRailVoltage(args);
- } else if (command == "toggle_charger") {
- toggleCharger(args);
- } else if (command == "status") {
- status();
-
- } else {
- Serial.println("Unknown command: " + command);
- }
-
- Serial.println();
- }
- }
-}
\ No newline at end of file
diff --git a/examples/Powershell/README.md b/examples/Powershell/README.md
deleted file mode 100644
index 9a21dd2..0000000
--- a/examples/Powershell/README.md
+++ /dev/null
@@ -1,78 +0,0 @@
-# Power ManagemtnInteractive Shell
-
-This sketch demonstrates the usage of the Power Management library to control and monitor power-related features of different Arduino boards. The sketch allows you to interact with various power management functionalities such as battery monitoring, charging control, and voltage rail adjustments.
-
-## Instructions
-
-1. Upload the sketch to your Arduino board.
-2. Open the serial monitor at a baud rate of 115200.
-3. Use the provided commands to interact with power management features.
-
-## Commands and Parameters
-
-### Toggle Rail
-Toggle the state of a specific power rail.
-
-Command: `toggle_rail `
-
-- ``: Specify the name of the power rail to toggle.
- - Options: `C33_external`, `C33_communication`, `H7_external`, `nicla_external`, `nicla_camera`
-- ``: Specify whether to turn the rail on or off.
- - Options: `1` (on) or `0` (off)
-
-### Set Rail Voltage
-Set the voltage of a specific power rail.
-
-Command: `set_rail_voltage `
-
-- ``: Specify the name of the power rail to set the voltage for.
- - Options: `C33_reference`, `C33_analog`, `C33_external`, `H7_external`, `nicla_external`
-- ``: Specify the voltage value to set for the rail.
- - Note: Voltage values must be within the acceptable range for the specific rail.
-
-### Toggle Charger
-Toggle the state of the battery charger.
-
-Command: `toggle_charger `
-
-- ``: Specify whether to enable or disable the charger.
- - Options: `1` (on) or `0` (off)
-
-### Status
-Display the status of the board, charger, and battery metrics.
-
-Command: `status`
-
-## Notes
-
-- Make sure to follow the guidelines for voltage and rail names to avoid unexpected behavior.
-- Be cautious when adjusting voltage values, as incorrect values may damage your board or battery.
-
-## Example Usage
-
-1. To turn on the external power rail on a Portenta C33:
- ```
- toggle_rail C33_external 1
- ```
-
-2. To set the reference voltage to 1.20V on a Portenta C33:
- ```
- set_rail_voltage C33_reference 1.20
- ```
-
-3. To enable the charger:
- ```
- toggle_charger 1
- ```
-
-4. To view the status of the board, charger, and battery metrics:
- ```
- status
- ```
-
-## License
-
-This sketch and library are provided under the [MIT License](LICENSE).
-```
-
-Feel free to modify and expand upon this template to suit your specific project and requirements.
\ No newline at end of file
diff --git a/examples/Standby_WakeFromPin/Standby_WakeFromPin.ino b/examples/Standby_WakeFromPin/Standby_WakeFromPin.ino
new file mode 100644
index 0000000..3c8b0c3
--- /dev/null
+++ b/examples/Standby_WakeFromPin/Standby_WakeFromPin.ino
@@ -0,0 +1,52 @@
+
+#include "Arduino.h"
+#include "Arduino_PowerManagement.h"
+
+
+#define PORTENTA_C33_WAKEUP_PIN A3
+#define GOTO_SLEEP_PIN D0
+
+volatile bool shouldGoToSleep = false;
+
+Board board;
+
+void setup() {
+ board = Board();
+ board.begin();
+ board.setAllPeripheralsPower(true);
+
+ // Allows to use a button to put the device into sleep mode
+ attachInterrupt(digitalPinToInterrupt(GOTO_SLEEP_PIN), goToSleep, RISING);
+
+ #if defined(ARDUINO_PORTENTA_C33)
+ // On Portenta C33, you can specify which pin to use to wake up the device from sleep mode
+ // Please read the documentation to understand which pins can be used to wake up the device.
+ board.enableWakeupFromPin(PORTENTA_C33_WAKEUP_PIN, RISING);
+ #elif defined(ARDUINO_PORTENTA_H7_M7) || defined(ARDUINO_GENERIC_STM32H747_M4) || defined(ARDUINO_NICLA_VISION)
+ // On Portenta only pin GPIO0 can be used to wake up the device from sleep mode
+ board.enableWakeupFromPin();
+ #endif
+
+
+
+ pinMode(LEDB, OUTPUT);
+}
+
+void goToSleep(){
+ shouldGoToSleep = true;
+}
+
+void loop() {
+ if(shouldGoToSleep){
+ shouldGoToSleep = false;
+ board.shutDownFuelGauge();
+ board.setAllPeripheralsPower(false); // turn off peripherals before going to sleep
+ board.standByUntilWakeupEvent();
+ } else {
+ // Show that the board is awake by blinking the LED
+ digitalWrite(LEDB, HIGH);
+ delay(1000);
+ digitalWrite(LEDB, LOW);
+ delay(1000);
+ }
+}
diff --git a/examples/Standby_WakeFromRTC_C33/Standby_WakeFromRTC_C33.ino b/examples/Standby_WakeFromRTC_C33/Standby_WakeFromRTC_C33.ino
new file mode 100644
index 0000000..aa6afd2
--- /dev/null
+++ b/examples/Standby_WakeFromRTC_C33/Standby_WakeFromRTC_C33.ino
@@ -0,0 +1,54 @@
+
+#include "Arduino_PowerManagement.h"
+#include "RTC.h"
+
+RTCTime initialTime(1, Month::JANUARY, 2000, 12, 10, 00, DayOfWeek::TUESDAY, SaveLight::SAVING_TIME_ACTIVE);
+
+Board board;
+
+void blinkLed(int ledPin, int delayTime = 1000){
+ digitalWrite(ledPin, LOW);
+ delay(delayTime);
+ digitalWrite(ledPin, HIGH);
+ delay(delayTime);
+}
+
+void setup() {
+ pinMode(LEDR, OUTPUT); // Used to indicate errors
+ digitalWrite(LEDR, HIGH); // Turn off the red LED
+ pinMode(LED_BUILTIN, OUTPUT);
+ digitalWrite(LED_BUILTIN, LOW); // Turn on the built-in LED
+ delay(1000);
+ digitalWrite(LED_BUILTIN, HIGH); // Turn off the built-in LED
+ pinMode(LEDB, OUTPUT); // Used to indicate that the board is awake
+
+ if(!board.begin()){
+ while (true){
+ blinkLed(LEDR);
+ }
+ }
+
+ board.setAllPeripheralsPower(true); // TODO: Check if this is necessary
+
+ digitalWrite(LEDB, LOW); // Turn on the blue LED to show that the board is still awake
+
+ RTC.begin();
+ if (!RTC.isRunning()) {
+ if(!RTC.setTime(initialTime)){
+ while (true){
+ blinkLed(LEDR);
+ }
+ }
+ }
+
+ // board.enableWakeupFromRTC(0, 0, 10, [](){}); // Sleep for 10 seconds
+ board.enableWakeupFromRTC(0, 0, 10); // Sleep for 10 seconds
+
+ delay(1000); // Keep the board awake for 1 second, so we can se it working
+
+ board.shutDownFuelGauge();
+ board.setAllPeripheralsPower(false);
+ board.standByUntilWakeupEvent();
+}
+
+void loop(){}
\ No newline at end of file
diff --git a/examples/Standby_WakeFromRTC_H7/Standby_WakeFromRTC_H7.ino b/examples/Standby_WakeFromRTC_H7/Standby_WakeFromRTC_H7.ino
new file mode 100644
index 0000000..6b776da
--- /dev/null
+++ b/examples/Standby_WakeFromRTC_H7/Standby_WakeFromRTC_H7.ino
@@ -0,0 +1,80 @@
+/*
+ Charger Demo
+
+ This sketch demonstrates how to use the PowerManagement library enable low power modes on the Arduino Portenta H7.
+ * In the setup() function, it enters standby mode and waits for a wakeup event from the RTC.
+ * The loop() functionit is not used in this sketch.
+
+ IMPORTANT: Please note that this sketch has to be uploaded to the M4 core too in order to achieve the lowest power consumption.
+
+ Requirements:
+ - Arduino Arduino Portenta H7
+ - Arduino IDE
+ - PowerManagement library (installable from the Arduino Library Manager)
+
+ Usage:
+
+ 1. Connect a battery to the board.
+
+ 2. Upload the Sketch to the M4 core:
+ - Open the provided sketch in the Arduino IDE.
+ - Select your board type and port from the "Tools" menu.
+ - Select the M4 core from the "Tools" menu.
+ - Click the "Upload" button to upload the sketch to your board.
+
+ 3. Upload the Sketch to the M7 core:
+ - Select the M7 core from the "Tools" menu.
+ - Click the "Upload" button to upload the sketch to your board.
+
+ 4. Observer LED behavior:
+ - The blue LED will turn on when the board is awake.
+ - The blue LED will turn off when the board goes to sleep.
+ - The red LED will blink if the board fails to initialize.
+*/
+
+#include "Arduino_PowerManagement.h"
+
+Board board;
+
+void blinkLed(int ledPin, int delayTime = 1000){
+ digitalWrite(ledPin, LOW);
+ delay(delayTime);
+ digitalWrite(ledPin, HIGH);
+ delay(delayTime);
+}
+
+void setup() {
+ // When uploading this sketch to the M4 core, it just goes to standby mode.
+ #if defined(ARDUINO_GENERIC_STM32H747_M4)
+ board.standByUntilWakeupEvent();
+ return;
+ #endif
+
+ pinMode(LEDR, OUTPUT); // Used to indicate errors
+ digitalWrite(LEDR, HIGH); // Turn off the red LED
+ pinMode(LED_BUILTIN, OUTPUT);
+ digitalWrite(LED_BUILTIN, HIGH); // Turn off the built-in LED
+ pinMode(LEDB, OUTPUT); // Used to indicate that the board is awake
+
+ // Turn on the blue LED to show that the board is still awake
+ digitalWrite(LEDB, LOW);
+
+
+ if(!board.begin()){
+ // If the board fails to initialize, it will blink the red LED
+ while (true){
+ blinkLed(LEDR);
+ }
+ }
+
+ delay(10000); // keep the board awake for 10 seconds, so we can se it working
+ board.shutDownFuelGauge();
+
+ // The LED should go off when the board goes to sleep
+ board.setAllPeripheralsPower(false);
+
+ board.enableWakeupFromRTC(0, 0, 10); // Go to standby for 10 seconds
+ board.standByUntilWakeupEvent();
+}
+
+void loop() {}
\ No newline at end of file
diff --git a/library.properties b/library.properties
index d1a844c..d0f62ae 100644
--- a/library.properties
+++ b/library.properties
@@ -2,9 +2,9 @@ name=Arduino_PowerManagement
version=1.0.0
author=Arduino
maintainer=Arduino
-sentence=Abstracts the functionality of the PF1550 Power Management IC and MAX17162 LiPo Fuel Gauge found in the Portenta C33, Portenta H7 and Nicla Vision boards.
-paragraph=
-category=Other
+sentence=A library to charge and monitor the battery and use low power modes on the Portenta C33, Portenta H7 and Nicla Vision boards.
+paragraph=Abstracts the functionality of the PF1550 Power Management IC and MAX17162 LiPo Fuel Gauge found in the Portenta C33, Portenta H7 and Nicla Vision boards.
+category=Device Control
url=https://github.com/arduino-libraries/Arduino_PowerManagement
architectures=renesas_portenta, mbed_portenta, mbed_nicla
includes=Arduino_PowerManagement.h
diff --git a/src/Battery.cpp b/src/Battery.cpp
index 9661201..ac68c7f 100644
--- a/src/Battery.cpp
+++ b/src/Battery.cpp
@@ -11,6 +11,7 @@ Battery::Battery(BatteryCharacteristics batteryCharacteristics) : characteristic
}
bool Battery::begin(bool enforceReload) {
+ // PMIC already initializes the I2C bus, so no need to call Wire.begin() for the fuel gauge
if(PMIC.begin() != 0){
return false;
}
@@ -34,7 +35,7 @@ bool Battery::begin(bool enforceReload) {
// Restore the original Hibernate Config Register value
writeRegister16Bits(this->wire, FUEL_GAUGE_ADDRESS, HIB_CFG_REG, tempHibernateConfigRegister); // Restore Original HibCFG value
- replaceRegisterBit(this->wire, FUEL_GAUGE_ADDRESS, STATUS_REG, 0x0, POR_BIT); // Clear POR bit after reset
+ replaceRegisterBit(this->wire, FUEL_GAUGE_ADDRESS, STATUS_REG, POR_BIT, 0x0); // Clear POR bit after reset
return true;
}
@@ -51,8 +52,6 @@ bool Battery::awaitDataReady(uint16_t timeout){
return false;
}
- // TODO Remove the print statement
- Serial.println("Waiting for the battery gauge to be ready...");
delay(100); // Wait for the data to be ready. This takes 710ms from power-up
}
}
@@ -72,9 +71,9 @@ void Battery::configureBatteryCharacteristics(){
void Battery::releaseFromHibernation(){
// See section "Soft-Wakeup" in user manual https://www.analog.com/media/en/technical-documentation/user-guides/max1726x-modelgauge-m5-ez-user-guide.pdf
- writeRegister16Bits(this->wire, FUEL_GAUGE_ADDRESS, HIB_CFG_REG, 0x0); // Exit Hibernate Mode
+ replaceRegisterBit(this->wire, FUEL_GAUGE_ADDRESS, HIB_CFG_REG, EN_HIBERNATION_BIT, 0); // Exit Hibernate Mode
writeRegister16Bits(this->wire, FUEL_GAUGE_ADDRESS, SOFT_WAKEUP_REG, 0x90); // Wakes up the fuel gauge from hibernate mode to reduce the response time of the IC to configuration changes
- writeRegister16Bits(this->wire, FUEL_GAUGE_ADDRESS, SOFT_WAKEUP_REG, 0x0); // This command must be manually cleared (0x0000) afterward to keep proper fuel gauge timing
+ writeRegister16Bits(this->wire, FUEL_GAUGE_ADDRESS, SOFT_WAKEUP_REG, 0x0); // Soft wake-up must be manually cleared (0x0000) afterward to keep proper fuel gauge timing
}
bool Battery::refreshBatteryGaugeModel(){
@@ -175,7 +174,7 @@ void Battery::setTemperatureMeasurementMode(bool externalTemperature){
configRegister = bitSet(configRegister, TSEL_BIT);
configRegister = bitSet(configRegister, ETHRM_BIT);
// FIXME: The external thermistor temperature measurement is not working as expected
- // In oder to support this, probably more configuration is needed
+ // In order to support this, probably more configuration is needed
// Currently after taking the first reading, the battery gets reported as disconnected
// plus the register value is reset to the default value.
} else {
@@ -207,7 +206,8 @@ uint8_t Battery::internalTemperature(){
}
setTemperatureMeasurementMode(false);
- // TODO also see DieTemp Register (034h) for the internal die temperature p. 24 in DS
+ // Also see DieTemp Register (034h) for the internal die temperature p. 24 in DS
+ // If Config.TSel = 0, DieTemp and Temp registers have the value of the die temperature.
return readRegister16Bits(this->wire, FUEL_GAUGE_ADDRESS, TEMP_REG) * TEMPERATURE_MULTIPLIER_C;
}
@@ -226,7 +226,6 @@ uint8_t Battery::batteryTemperature(){
}
setTemperatureMeasurementMode(true);
- // TODO possibly await a couple of readings before getting a meaningful temperature
return readRegister16Bits(this->wire, FUEL_GAUGE_ADDRESS, TEMP_REG) * TEMPERATURE_MULTIPLIER_C;
}
@@ -340,13 +339,6 @@ bool Battery::isEmpty(){
return getBit(this->wire, FUEL_GAUGE_ADDRESS, F_STAT_REG, E_DET_BIT) == 1;
}
-bool Battery::chargingComplete(){
- // TODO This needs to be tested, probably it's a valua that only temporarily indicates the end-of-charge condition.
- // TODO there is also a FULL_DET_BIT in the STATUS2 register but the datasheet does not explain it
- // return getBit(this->wire, FUEL_GAUGE_ADDRESS, STATUS2_REG, FULL_DET_BIT) == 1;
- return getBit(this->wire, FUEL_GAUGE_ADDRESS, F_STAT_REG, FQ_BIT) == 1;
-}
-
int32_t Battery::timeToEmpty(){
if(!isConnected()){
return -1;
diff --git a/src/Battery.h b/src/Battery.h
index 109775f..fc0379c 100644
--- a/src/Battery.h
+++ b/src/Battery.h
@@ -15,6 +15,9 @@ enum class NTCResistor {
Resistor100K
};
+/**
+ * @brief This struct contains the characteristics of the battery.
+*/
struct BatteryCharacteristics {
/// @brief The battery's capacity in milliampere-hours (mAh).
int capacity = 0;
@@ -33,6 +36,7 @@ struct BatteryCharacteristics {
/// @brief The NTC resistor value used in the battery pack (10K or 100K Ohm).
NTCResistor ntcResistor = NTCResistor::Resistor10K;
+ /// @brief Sets the voltage level for clearing empty detection. Once the cell voltage rises above this point, empty voltage detection is re-enabled.
float recoveryVoltage = DEFAULT_RECOVERY_VOLTAGE;
};
@@ -46,6 +50,10 @@ class Battery {
*/
Battery();
+ /**
+ * @brief Initializes the battery object with the given battery characteristics.
+ * @param batteryCharacteristics The characteristics of the battery.
+ */
Battery(BatteryCharacteristics batteryCharacteristics);
/**
@@ -146,7 +154,7 @@ class Battery {
int16_t averagePower();
/**
- * @brief Reads the current temperature of the internal die.
+ * @brief Reads the current temperature of the internal die of the battery gauge chip.
* @return The current temperature in degrees Celsius.
*/
uint8_t internalTemperature();
@@ -192,13 +200,6 @@ class Battery {
*/
bool isEmpty();
- /**
- * @brief Checks if the battery charging is complete.
- *
- * @return true if the charging is complete, false otherwise.
- */
- bool chargingComplete();
-
/**
* Calculates the estimated time until the battery is empty.
* @return The estimated time until the battery is empty, in seconds.
@@ -269,7 +270,7 @@ class Battery {
#if defined(ARDUINO_PORTENTA_C33)
TwoWire *wire = &Wire3;
- #elif defined(ARDUINO_PORTENTA_H7_M7) || defined(ARDUINO_PORTENTA_H7_M4)
+ #elif defined(ARDUINO_PORTENTA_H7_M7) || defined(ARDUINO_GENERIC_STM32H747_M4)
TwoWire *wire = &Wire1;
#elif defined(ARDUINO_NICLA_VISION)
TwoWire *wire = &Wire1;
diff --git a/src/BatteryConstants.h b/src/BatteryConstants.h
index 2fb6878..b830a03 100644
--- a/src/BatteryConstants.h
+++ b/src/BatteryConstants.h
@@ -104,7 +104,8 @@
#define E_DET_BIT 8 // FStat Register: Empty Detection. This bit is set to 1 when the IC detects that the cell empty point has been reached. This bit is reset to 0 when the cell voltage rises above the recovery threshold.
#define FULL_DET_BIT 5 // Status2 Register: Full Detection.
#define FQ_BIT 7 // FStat Register: Full Qualified. This bit is set when all charge termination conditions have been met. See the End-of-Charge Detection section for details.
-#define EN_HIBERNATION_BIT 15
+#define EN_HIBERNATION_BIT 15 // HibCfg Register: Enable Hibernate Mode. When set to 1, the IC will enter hibernate mode if conditions are met. When set to 0, the IC always remains in the active mode of operation.
+#define SHDN_BIT 7 // Config Register: Write this bit to logic 1 to force a shutdown of the device after timeout of the ShdnTimer register
#define HIB_BIT 1 // Hibernate Status. This bit is set to a 1 when the device is in hibernate mode or 0 when the device is in active mode. Hib is set to 0 at power-up.
#define R100_BIT 13 // The R100 bit needs to be set when using a 100k NTC resistor
#define VCHG_BIT 10 // Set to 1 for charge voltage higher than 4.25V (4.3V–4.4V). Set VChg to 0 for 4.2V charge voltage.
diff --git a/src/Board.cpp b/src/Board.cpp
index b8a54f9..dae153d 100644
--- a/src/Board.cpp
+++ b/src/Board.cpp
@@ -1,6 +1,9 @@
#include "Board.h"
+#include "MAX1726Driver.h"
#include